
さまざまな球面モータ(2013年7月31日材料追記)

はじめに
新年度に入るにあたり、球面モータの研究に従事する学生さんに「球面モータ」について知ってもらうために「球面モータ」の解説をしていこうと思います
まずは、いままでにどのような「球面モータ」が開発されてきているのかについて記述します。
駆動原理などの説明は今後追記していく予定です
球面モータは、可動子を、回転中心点周りの任意の方向に回転させることができるモータで、さまざまな駆動原理のものが考案されています
電磁型球面モータ
#高性能フェライト磁石
2023年7月31日(NEW!)
プロテリアルが電動車駆動モーター用高性能フェライト磁石の提案を開始 https://t.co/wvCpoED40K pic.twitter.com/3umz51hVuq
— MONOist製造マネジメント (@mono_promng) January 13, 2023
さまざまな球面モータ(産総研)
球面誘導モータ(東京都市大学)
東京都市大学の海老原らはアルミ厚をメカニカルギャップと同一の1mmとしてロータの渦電流損を減らした球面誘導モータを試作した。ロータは,内径70 mm,外径 78 mmの中空鉄球にアルミニウムが溶射された外径80 mmの球体である。Z軸周り回転用の電機子巻線は全周に渡って配置されているが,X軸周り回転用とY軸周り回転用の電機子巻線は半周分だけの配置にして,ロータの上半分が露出するようにしている。試作した球面モータはZ軸周りに1000rpm、X,Y軸周りに60rpmの高速回転を行い、回転中の軸の方向決めが可能である

田中飛鳥,和多田雅哉,鳥居粛,海老原大樹;「多自由度アクチュエータの提案と設計」, 第11回MAGDAコンファレンス講演論文集, pp.169-172, 2002
球面誘導モータ(Louvain大学)
Louvain大学のB.Dehezらはロータを薄い球殻とした球面誘導モータを試作した。用途はロボットを全方向駆動する球面駆動車輪である。ロータは鉄球の表面に導体としてCu-Sn-Zn合金(青銅)を溶射している。車輪として摩擦伝達で回転力を取り出すので,硬度と耐磨耗性のあるCu-Sn-Zn合金を使用している。直交する2つの回転軸に対応する位置に矩形の三相電機子巻線を配置し,2つの回転軸まわりの回転磁界を発生することによりそれぞれの軸まわりのトルクを発生している。1軸回りの回転実験では14000rpmで0.15Nmのトルクを得ている

B. Dehez, D. Grenier, and B. Raucent; “Two-Degree-of Freedom Spherical Actuator for Omnimobile ROBOT”, Proceedings of 2002 IEEE International Conference on Robotics and Automation, pp.2381-2386, 2002
球面ステッピングモータ(BELL研)
ベル研のBenjaminらは小型3自由度球面ステッピングモータを開発した。一組の永久磁石が作る界磁中にロータを配置する。ロータの3軸周りに電機子巻線を巻いて電機子電流を流すと、フレミングの左手の法則にしたがってロータにトルクが発生し、ロータを位置決めすることができる。繰り返し位置決め精度は0.15degで、0.015kgのものを駆動できる。本体は0.16kgでCCDカメラを中心部に搭載してロボットの眼を構成している。開発した球面モータを小型歩行ロボットの脚駆動機構としても用いている。3つの電機子巻線のいずれかに電流を流して特定の位置にロータを位置決めする。

Benjamin B. Bederson, Richard S. Wallace, and Eric L. Schwartz;” A Miniature Pan-Tilt Actuator: The Spherical Pointing Motor”, IEEE Transaction on Robotics and Automation, Vol.10, No.3, pp.298-308, 1994
球面DCサーボモータ(NTT)
NTTの金子らは球面3自由度DCサーボモータを試作した。この球面モータはステータに3組の電機子巻線を巻き、X,Y,Zの各軸周りの回転を制御する電流を重ね合わせることにより極対数2の永久磁石で構成されるロータの回転方向を制御する。動作範囲はZ軸中心に±15degの円錐内で、出力軸周りに200rpmで回転しつつ回転軸の方向決めができる。それぞれの電機子巻線が発生するX軸、Y軸、Z軸まわりの駆動力を合成する。

K.Kaneko, I.Yamada, and K.Itao; “A Spherical DC Servo Motor with Three Degrees of Freedom”, Transaction of the ASME Journal of Dynamic Systems, Measurement, and Control, pp.398-402, 1989
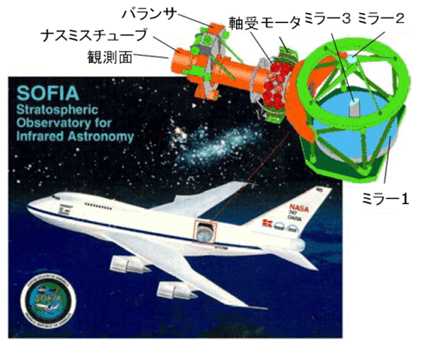
球面DCステッピングモータ(Darmstadt大学)
米独共同で開発が進められているSOFIA(遠赤外線天文学成層圏天文台)計画で、NASA との共同開発によりボーイング747-SPジャンボジェット機に搭載された2.5メートル赤外線望遠鏡の光軸を3方向にトラッキングする球面モータ。SOFIA計画は米国,NASAで全体の運営を担当しており,独は望遠鏡の開発を担当した。球面モータの開発はDarmstadt大学の担当である。モータの直径は915 mmであり,望遠鏡の光軸をロール、ピッチ、ヨーの3方向に±3deg駆動する。すでに球面モータを含む望遠鏡は完成しNASAに納品されてジャンボジェット機に搭載されている。
ロータをロール、ピッチ、ヨー方向に駆動する駆動部が別個に設けられている。
M.Anders, A.Binder, and M.Suess; ”A Spherical Linear Motor as Direct Drive of an Airborne Optical Infrared Telescope”, Proceedings of LDIA2005, Vol.1, pp.528-531, 2005
球面同期モータ(Johns Hopkins大学)
Johns Hopkins大学のD.Stainらは球殻状のステータに16個の電機子巻線、直径12インチのロータに直径0.75インチの永久磁石80個を配置した球面モータを試作した。ロータの永久磁石間ピッチと電機子巻線間ピッチを等間隔に近い配置としている。ロータの駆動方向近傍に位置する電機子巻線に電流を流すことによりロータのステッピング動作を実現している。ステータのくぼみに置いた13個の小球でロータを保持している。

Stain, D., Scheinerman, E. R., Chirikjian, G. S.; “Mathematical models of binary spherical-motion encoders,” Transaction on Mechatronics, Vol.8, No.2, pp.234-244, 2003
球面ステッピングモータ(岡山大学)
岡山大学の五福らは球面ステッピングモータを試作した。ロータを中空の二重構造にして、中空部に液体を注入して撹拌する用途を想定している。ロータに内接する正十二面体と正二十面体の頂点に永久磁石をN極が外側になるように配置し、N極を外側にして配置した永久磁石を結んでできる三角形の中心に、S極が外側になるように永久磁石を配置している。直径200mmの球殻に直径20mm厚さ5mmのネオジム磁石を91個貼り付けた2kgのロータを80個の電機子巻線に電流を流して最高速度8.87rad/sec、最大トルク1.18Nmである。

W.Shan, A.Gofuku, M.Shibata,T.Yano, and T.Kamegawa; “A stirrer driven by a spherical stepping motor”, Proceedings of the 15th International Symposium on Electromagnetic Fields in Mechatronics, Electrical and Electronic Engineering (ISEF), pp.1-6, 2011
球面リラクタンスモータ(Georgia Institute of Technology)
Georgia工科大学のK.M.Leeらは高速で回転するアクチュエータの回転軸方向をオープンループで制御する球面車輪リラクタンスモータを試作した。ステータに20個の電機子巻線、ロータに16個の永久磁石をそれぞれ2段に配置し、ロータ半径 76.2mmの球面リラクタンスモータを試作した。自動車の車輪駆動に用いればを特別な機構を付加することなくステアリングを切ることができる。

K.M.Lee, H.Son, J.Joni; ”Concept Development and Design of a Spherical Wheel Motor (SWM)”, Proceedings of the 2005 IEEE International Conference on Robotics and Automation, pp.3663-3668, 2005
球面同期モータ
軌道追従制御のロバスト化

Kun Bai, Yaowu Ding, Zixin Que, Han Yan, Xiang Chen, Shengxiong Wen,
and Kok-Meng Lee; ”Regulation and Tracking Control of Omnidirectional Rotation for Spherical Motors”,IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 70, NO. 2,pp.1696-1705, FEBRUARY 2023
球面同期モータ(Aahen工科大学)
Aahen工科大学のK.Kahlenらは、球面の緯度経度にそって希土類永久磁石を市松模様にマッピングしたロータを半球殻の内面に配置した96個の電機子巻線により駆動する球面同期モータを開発した。直径275 mmのロータを経度方向に角度で16等分、緯度方向に角度で6等分して、96極の永久磁石をN極とS極交互に貼り付けている。96個の電機子巻線電流は96個のDSPボードで実時間計算し、96個のインバータで駆動する。ロータの支持に油による静圧軸受を使用している。赤道回りに全回転角、地軸に対して±70degの可動範囲を有し、最大速度115rpm、最大トルク40 Nmである。この構成では回転子地軸の傾きに従って電機子巻線から見たロータの磁極ピッチが変化する。このために発生するトルクリップルとディテントトルクに対する解決策が課題としている。

K.Kahlen, and R.W.DeDoncker; “Current regulators for multiple-phase permanent magnet spherical machines”, Proceedings of 2000 IEEE Industrial Application, pp.2011-2015, 2000
球面同期モータ(Shefield大学)
Shefield大学のK.Mitchellらは、外径44mm、内径24mm、可動範囲±45deg、最大トルク0.4Nm、最高回転速度245rpmの球面同期モータを開発した。課題として,ロータの出力を取り出すためにステータに開けた開口部が磁気回路のアンバランスを引き起こすことを指摘している。

J.Wang, K.Mitchell, G.W.Jewell and D.Howe; “Multi-Degree-of Freedom Spherical Permanent Magnet Motors”, Proceedings of ICRA2001, pp.1798-1805, 2001
球面リアクションスフィア(Swiss Center for Electronics and Microtechnology社)
Swiss Center for Electronics and Microtechnology社のE.Onillonらは宇宙船の姿勢制御用球面リアクションホイールを試作した。ロータ表面を8等分してそれぞれの表面がN極とS極交互になるように永久磁石を貼り付けている。それぞれの面の磁束密度が正弦波分布になるように厚さが異なる多数の永久磁石を貼り付けている。ステータは正十二面体の頂点に20個の電機子巻線を配置している。ロータは磁気軸受で支持し、8個の磁束センサでロータ位置を計測している。重量14.1kg、入力電力70wで最高回転数6000rpm、最大トルク6Nm、角運動量27Nmsである。

E.Onillon et.al.; ”Reaction Sphere for Attitude Control”, Proceedings of 13th European Space Mechanisms and Tribology Symposium, 2009
Reaction Sphere Actuator
リアクションホイールの球面モータ版,球体回転子を磁気浮上させて回すというもの

Leopoldo Rossini, Emmanuel Onillon, Olivier Chételat, Yves Perriard;”Closed-loop magnetic bearing and angular velocity control of a reaction sphere actuator”,Mechatronics 30,pp.214–224,2015
球面同期モータ(阪大)
大阪大学の平田らが,ロボットの手首や肩関節の駆動を想定して球面同期モータを試作している。直径90 mm,出力トルク2 Nm,可動範囲-30 deg ~ 30 degを目標仕様としてさまざまな球面モータの構造を提案している。
平田勝弘先生のグループは現在も精力的に新しい球面モータを開発しておられますが、ここでは2012年以前に開発された球面モータを紹介しています
可動範囲の広い3自由度球面モータ
可動範囲が垂直軸回りに無限回転,水平軸回りに-25 deg ~ 25 degの3自由度球面アクチュエータ。ステータの上段と下段に60 deg間隔で6極の電機子巻線を配置している。ロータは出力軸回りに90 deg間隔でN極とS極の永久磁石を交互に配置している。垂直軸回りの駆動は上下の磁極を同相にして,隣り合う電機子巻線に120 deg位相がずれた正弦波電流(3相交流)を流すことにより1自由度の3相同期モータと同様の原理で位置決めが可能である。水平軸回りの駆動は回転ベクトルと垂直成分を有する電機子巻線の上下の励磁電流を制御することにより1自由度の2相同期モータと同様の原理で位置決めが可能である。磁極間距離5.5 mm,磁極幅8 mm,磁極厚さ1.5 mm,電機子巻線500 turn,定格電機子電流1.5 AとしてX軸,Y軸,Z軸まわりの最大トルクがそれぞれ0.90 Nm,1.81 Nm,2.61 Nmの解析結果を得ている。

前田修平,平田勝弘;「広角駆動可能な三自由度球面電磁アクチュエータの開発」,電気学会研究会資料,Vol.LD-10, No.62, pp.25-30, 2010
可動範囲の広い2自由度球面モータ
出力軸がX軸回りに回転してもY軸回りに回転するロータはX軸回りに回転しないように,Y軸回りに回転するロータに出力軸が移動可能なガイドを設けている。X軸回りに回転するロータはY軸回りに回転しても電機子巻線に対する永久磁石のピッチが一定に保たれるように同心円状に永久磁石を配置している。電機子巻線は460 turn,電機子電流は0.85 Ap-pの正弦波電流,エアギャップは0.7 mmである。X軸回りとY軸回りそれぞれの電機子巻線にそれぞれ異なる周波数の3相交流電流を流すことにより各軸を独立かつ同時に-25 deg ~ 25 degの範囲で位置決めできる。最大トルクの設計値は0.54 Nmである。

堺谷洋,平田勝弘,新口昇,佟明宇,前田修平;「広角駆動可能な二自由度球面電磁アクチュエータ」,電気学会研究会資料,Vol.LD-11, No.63, pp.47-51, 2011
アウタロータ球面モータ
球殻状のロータの内側に中心角22.5 degで永久磁石を円環状にはりつけている。ステータは電機子を30 deg間隔で4極配置したユニットを垂直軸回りに60 deg間隔で6組配置している。2組もしくは4組のユニットの電機子巻線に三相交流電流を流すことによりロータを水平軸回りに無限回転させることができる。ステータ直径84 mm,ロータ外径96 mm,エアギャップ0.7 mm,電機子巻線475 turn,電機子電流0.8 Aで平均トルクがX軸1.1 Nm,Y軸0.71 Nmの設計となっている。

塚野聖仁,平田勝弘,前田修平,佟明宇,新口昇;「アウタロータ型球面アクチュエータに関する研究」,電気学会研究会資料,Vol.LD-11, No.64, pp.53-58 , 2011
球面同期モータ(xi'an jiaotong university)
無線電力伝送で球面アクチュエータの姿勢測定

Shihao Gao, Qunjing Wang, Guoli Li,Zhe Qian,Qiubo Ye, Sili Zhou , and Zheng Li;"Spherical_Motor_Position_Detection_Method_Based_on_Accurate_Modeling_of_Wireless_Power_Transmission",IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 70, NO. 3, pp.2855-2865,MARCH 2023
球面同期モータ(Central South University)
球面モータの曲面印刷応用

Kun Bai, Ruoyu Xu, Kok-Meng Lee,Wang Dai, and YongAn Huang;"Design_and_Development_of_a_Spherical_Motor_for_Conformal_Printing_of_Curved_Electronics",IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 65, NO. 11, pp.9190-9200,NOVEMBER 2018
超音波球面モータ
超磁歪球面モータ、磁性流体を利用した球面モータ
おわりに
とりあえず、2012年9月以前の研究を中心にnoteしました
2013年分以降は随時、追記していく予定です
謝辞
磁性流体を利用した球面モータの研究を教えていただいた
名古屋大学の部矢先生に謝意を表します
いいなと思ったら応援しよう!
