海中周囲雑音を積極的に利用したイメージング

2018年1月時点の内容です
はじめに
海中周囲雑音を積極的に用いて物体探知・海洋構造推定・底質推定などを行おうとする研究は、1990 年代初頭から少しずつ芽生えてきました。このような海洋音響研究の一分野を周囲雑音インバージョン(Ambient Noise Inversion)と呼びます。その先駆けは、スクリップス海洋研究所のBuckingham研究グループが行ったアコースティックデイライトに関する一連の研究成果です。このアイディアは画期的なもので、あたかも人間が太陽光で物体を認識しているように、海中周囲雑音を太陽光と見なして海中物体を認識するというものです。これは、アクティブ方式のように探知する側から音波を照射する必要もなく、またパッシブ方式のようにターゲットからの放射音も必要ないことから、第3のソーナー方式として注目されました。最近では、本手法は周囲雑音イメージングとも呼ばれています。従来、周囲雑音はターゲット検出を妨げる邪魔者であったのに対して、本手法は雑音を積極的に利用するという、ソーナーにおけるパラダイムシフトとも考えられます。
本稿では、周囲雑音イメージングの最近の動向と筆者らの研究について簡単に紹介します。
周囲雑音イメージングの考え方
従来、海中音波を利用して物体探知を行うソーナーにおいて、周囲雑音は計測対象の音響特性を乱し、探知を妨げるものと考えられてきました。ところが、海中周囲雑音を物体探知に積極的に利用しようとする新しい考え方が提案されています。図1にソーナー方式と光学カメラを対比させています。
(a)のアクティブ方式では、計測側から探信音波を送信し、ターゲットで発生するエコー(反射波・散乱波)を受信します。ターゲット自体は音を放射する必要はありませんが、計測側が逆探知される恐れがあります。これを光学カメラに対比させると(b)のフラッシュによる撮影になり、被写体は光を発していなくてもよいことになります。(c)のパッシブ方式では、専らターゲットの放射音を聴音します。逆探知される恐れは無いのですが、ターゲット自身が無音の場合には探知できません。これを光学カメラに対比させると(d)の光源自体の撮影になり、暗所にある光源(焚き火、電灯など)に対してフラッシュを使わないで撮影していることになります。ただし、被写体自体が光を発している必要があります。
(e)は風浪雑音や生物雑音などの海中周囲雑音を音源としてターゲットからのエコーあるいは雑音場の変化を計測するアコースティックデイライト方式です。ターゲットは音を発していなくてもよく、アクティブ方式の探信音波の代わりに、海中雑音を積極的に利用することになります。また、計測側から音を発しないので逆探知の恐れもありません。これは、アクティブ方式でもパッシブ方式でもない第3の新しいソーナー方式です。光学カメラに対比させると(f)の太陽光による撮影になります。フラッシュの代わりに、太陽という優れた自然光源があり、被写体は光を発していなくてもよいことになります。このように海中に満ちあふれている周囲雑音を太陽光に擬えていることが、アコースティックデイライトという呼称の所以です。
この新しい方式は、近年発行された水中音響関連書籍にも記載されるほど一般的になりつつあります。呼称については、当初Buckinghamらが名付けたアコースティックデイライトや、その変形であるDaylight/Ambient Sonar Systemなどとも呼ばれていましたが、近年では物体映像化に利用されることから、周囲雑音イメージング(Ambient Noise Imaging: ANI)が徐々に定着しつつあります。
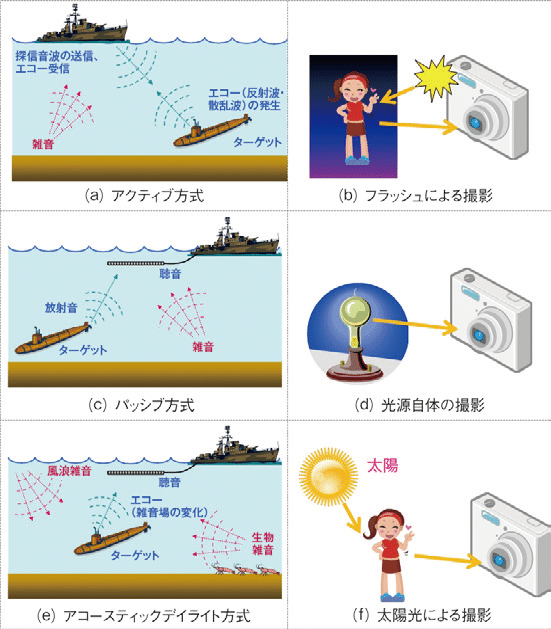
図1:ソーナー方式(左列)と光学カメラ(右列)との対比
周囲雑音イメージングの研究動向および
筆者らの研究の紹介
アコースティックデイライト方式をイメージングソーナーとして実現しようとする周囲雑音イメージングの研究がいくつか行われています。その概念図を図2に示します。本手法は、例えばテッポウエビによる沿岸域海中周囲雑音によって生成されるターゲットエコーを捉えるものであり、広い周波数帯域の雑音源に対応するために広帯域マルチビーム受信機として構成されます。ここで、各受信ビームで捉えられた音響強度を方位毎に白黒濃淡や疑似カラーなどで色分けすることで、物体映像が形成されます。実海域上で周囲雑音イメージングに成功した実験システムは3つあります。表1にこれらのシステムの比較を示します。
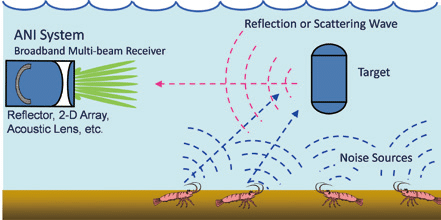
図2:周囲雑音イメージングの概念

表1:周囲雑音イメージング実験装置の比較
まず、第一に提唱者のBuckinghamらのグループは、開口径および曲率半径3m、焦点距離1.5mの球面状反射板の像点面に126素子の受波器アレイを配置したADONIS(Acoustic Daylight Ocean Noise Imaging System)を開発しました。第二にシンガポール国立大学のVenugopalanらの研究グループは、2次元アレイによるROMANIS(Remotely Operated Mobile Ambient Noise Imaging System)を開発しました。第三に筆者らは、2005年頃から数値計算および水槽による縮尺実験により、周囲雑音イメージングに適用する音響レンズの検討を行ってきました。
2009 年以降は、実海域での利用を想定した非球面音響レンズによる周囲雑音イメージングシステムの開発を行いました。ここでは、対象周波数帯域を40~200kHzと想定し、中心周波数120kHzでビーム幅が1度、視野角14度を有するレンズとして設計・製作しました。本レンズは開口直径1mで実現され、距離10~50mにある物体を映像化する実海域試験に利用することを目標としています。図3に実海域試験の配置を示します。
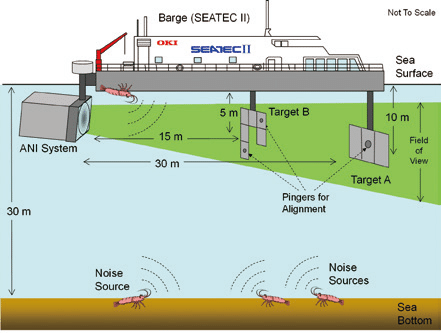
図3:OKI SEATEC IIを用いた音響レンズシステムの実験配置図
この試験では、株式会社 オキシーテックに協力をいただき、内浦湾に係留された実験バージOKI SEATEC IIを利用しました。この海域の海底深度は約30mです。「ANIプロトタイプシステム」はバージの端に固定し、水平視野角-7~+7 度および垂直視野角-4~+4 度の範囲で、1度毎の入射角度に対応する像点に127素子の受波器アレイを設置しました。この受波器アレイはMSI Transducers社のピエゾコンポジット技術により製作されました。これより、15×9画素のターゲット画像を取得することができます。ターゲットは、横3m×縦1m×厚4mmのアルミ板に独立気泡を有するネオプレンゴムシートを貼り付けたものを約30mの距離に配置しました(Target A)。また、横0.5m×縦0.5m×厚1mmのアルミ板に独立気泡を有するネオプレンゴムシートを貼り付けたものを複数枚組み合わせてJ字状に配置したターゲットを約15mの距離に配置しました(Target B)。
図4に海中周囲雑音によるターゲット検出実験結果の一例を示します。実験では、主に計測バージ底面に生息するテッポウエビから発する雑音を音源とした、複数のターゲットエコー信号が受信されました。これらのパワースペクトルを計算し、150~200kHzの帯域レベルを画素値として得た画像を結合して、最終的なターゲット探知画像が取得できました。図4(a)はTarget Aの視野内での配置、そして、図4(b)はTarget Aの探知画像です。また、図4(c)はTarget Bの視野内での配置、そして、図4(d)はTarget Bの探知画像です。両ターゲットともに、受信強度はターゲット方向で増加しており、ターゲット形状とよく一致しています。
これより、筆者らの開発したANIプロトタイプシステムは海中周囲雑音のみによる無音ターゲットの検出に成功し、今のところ最も小型化されたシステムです。

図4:音響レンズシステムによる物体探知結果
おわりに
本稿では、海中周囲雑音を積極的に利用する物体探知手法である周囲雑音イメージングについて簡単に紹介しました。筆者らは、これを実現するための非球面音響レンズを用いたプロトタイプシステムの評価を続けています。現在は、周波数依存エコーを有するターゲットの映像化に取り組んでいます。2016年秋には、模擬ターゲットとしてSubsea Asset Location Technologies 社のSonarBellを用いた実海域試験を行いました。現在は、その実験データ解析を鋭意進めているところです。本稿をきっかけに、読者諸氏がこの分野の研究に対して興味を持っていただければ幸いです。

図5:OKI SEATEC II上の音響レンズシステムと筆者
筆者紹介
防衛大学校 応用科学群地球海洋学科 教授 森 和義
信号処理、並列処理、海洋音響、ソーナーに関する研究に従事。1998年度および2008年度海洋音響学会論文賞受賞、2000年度海洋音響学会優秀論文発表賞受賞、2012年SPOTLIGHTS:Editors' Choice from APEX and JJAP選出。

