ルミナスミラージュ製作実況中継 #3

肘の関節を考える
テーマ1つ目である『ポーズを大胆に変える』の続きです。
今一度、目指すポーズがどんなものだったかをおさらいしますと
レイピアを構えた”静”の決めポーズ。
具体的にいうとフェンシングのポーズを参考にしようと
心に決めたのでした。
前回は脚の改造でしたが、今回は脚とほぼ同時進行で進めていた右腕の改造です。
まだ去年の貯金で記事を書いており、タイトルにある『実況中継』にはなっていません。
まずは目指すフェンシングのポーズをもう一度確認
画像検索でそれっぽいのが幾つか見つかりました。

①にすることを念頭に脚の開き具合を調整したのですが、
②、③もシュッと閉じた脚に似合いそうです。
④はいかにも!フェンシングなポーズですが、
もともとの構想はフェンシングのポーズそのものの再現ではなく、
レイピアの構えの着想をフェンシングから得る事。ですし、
この④のポーズ、下半身は見えませんが、
少し足が開いているほうが似合うと思い却下!
⑤はマチルダさんに哀悼の意を表するような、
厳粛感のあるポーズなのですが、
『決め!』という感じではないので見送り。
結局②,③が①に勝てるか?という比較になりました。
うーん、①の勝ち!
えっ!?そんなにあっさり?
だってなんだか
②は『勝利の栄光は君に!』とか言って裏切られそうだし、
③はなんとなく『スカポンタン、やっておしまい!』と言われているようなので!
めでたく、ポーズが決まったのは良いのですが、ちょっと待ってください‼
①だけが他と違う所に気づきましたか?
肘が90°以下の鋭角に曲がっているのです。
これは一大事‼
『舟を編む』
『命を捨てて俺は生きる』
『ロボットの肘を深く曲げる』
いずれも困難な事です。
ガンダムで言いますと、プラモデルでアニメの設定画とアニメ本編での動きのギャップを如何に埋めるのか?という難題です。
ガンプラの歴史は肘、膝曲げ角度拡大への
プラモデル会社エンジニアの挑戦の歴史と言っても過言ではありません。
ガンダムの設定画です
私の名前は、ガンダムでっすぅ。
あぁ、もちろんあだ名に決まってまっす。
(本名はRX-78)。

もはや”設定画が一番正しい症候群”ですが、
残念ながら左手はガンダムシールドで隠れており、
右手も黄色いポケット(中からいろいろな道具が出てくる?)の陰になって良く見えませんね。
拡大してみましょう。ん?いかにも蝶番(ちょうつがい)の軸のようなものが付いていそうです。
ちなみに腕とは全く関係ありませんが、同じポーズなのに
ガンダムシールドの上下の向きが絵によって違っているというところに、
子供心としてはとてつもないリアリティーを感じていたものでした。
アニメシーンでのガンダムの腕

作画崩壊しているところは、ファーストガンダムの最大の魅力ですので、
これはお気になさらず!
左のはいかにも動きそうな関節として描かれています。
右はというと、関節であることを放棄しているというか、
腕時計ならぬ肘時計みたい。(よく見ると関節のほうが腕より太い)
これがどう曲がるかというと

↑これは絶対無理でしょう‼
では、結局プラモデル会社のエンジニアが、この難題にどのように挑んだのかというと、“二重関節”です。
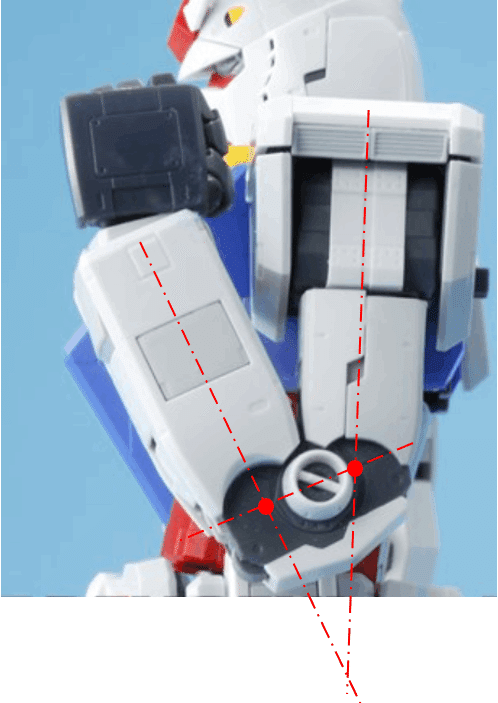
152°くらい曲がっています。
これはもう”深く曲げている”といって良いでしょう。
しかしです。
あきらかに膝のヒンジが意味なくなっているのは仕方ないとしても、
腕を曲げると内部から関節のブロックみたいなのがみょい~んと
出てきています。
ここが人類の叡智の到達点なのか?もう少し研究してみましょう。
餅は餅屋、関節は産業機械へ聞け!
現実世界にある”ロボット”の“腕=アーム”を参考にしてみようと思います。
パワーショベル

力を稼いでいるところが人体とは大違い
写真はキャタピラー社のパワーショベルですが、
どのメーカーでも構造はほとんど同じ。
丈夫なアームがヒンジで連結されており、
駆動は外部に取り付けられた油圧シリンダーにより行われる
非常にシンプルな構造。
力は強いが動きは単純で、あまり機敏には動けないでしょう。
これにイメージ着想したのは『エイリアン2』のパワーローダー。
やっぱり作業用ですが、リプリーさんが頑張って
エイリアンクイーンと闘っております。

次は『はたらくおじさん』で工場見学すると出てくるであろう
産業用ロボット
腕の参考になる、というかもう腕だけです。
これは幾つも、デザインのバリエーションがあるようで、
最近はずいぶんおしゃれなものもあるようですね。
皆さんもリビングのインテリアにでもして、コーヒーなど入れてもらうのはいかがでしょうか?

こちらの関節も機能的ではありますが、かなり割り切った作りです。
二本の棒で一本を挟んだり、一本の側面にもう一本つなげたりと、
割り箸工作でよくやるような関節構造。
駆動はモーターが主流で動作はキビキビしていますが、
あまり重いものは持てません。
こちらにインスパイアされたと思われるのがロボットアニメ境界戦機。
(腕ではなく脚ですが)
いや実はプラモ雑誌でしか知りません。アニメは見たことがないのです。
まぁデザインは面白いと思いますけど…

人型特殊起動兵器『AMAIN(アメイン)』というのだそうです。
アメイン、アメインね… まぁ見ていないものを批評するのはやめておこう。
すでに何の考察だったのか忘れかけていましたが、あぁ思い出しました。
モーターヘッドの腕の曲げ方の研究ですね。
”パワーローダー”でも”アメイン”でもありませんので、
現実世界のロボットは参考にならない!
やはり人型ロボットのお手本はやっぱり人体!ということで
人間の関節の構造に立ち返って、 “解体新Show“

肘関節のメイン構造は上腕骨と尺骨との腕尺関節。
構造は蝶番関節と書いてある、なんだ!ガンダム正しいじゃん。
副関節として腕をひねることができるように、
橈骨(こうこつ)と上腕骨の間の腕橈関節、
橈骨と尺骨の間の上橈尺関節
があり、
全部で豪華3関節の集合のようです。
なお腕橈関節は球関節(ボークスMMでおなじみボールジョイント)
上橈尺関節にいたっては車軸関節(くるまっすか?)で
もう工業製品レベルの構造ですね。
ただ人体というか動物の凄いところは、
この関節を適切な張力でホールドする靭帯と
俊敏、強力、フレキシブルなアクチュエータである筋肉の存在。
その結果腕を曲げると、腕尺関節を軸にきれいに折りたたまれ、
関節内側の靭帯や筋肉が全く可動を邪魔していません。

再び角度を変えて登場いただいたガンダムの腕さんとくらべても
違いは一目瞭然
こんなに腕っぷしの太いおじさんの腕も
ちゃんと腕尺関節を中心として曲がっています。
ちなみに人間の腕の曲がる角度は145°くらいまでだそうで、
プラモデル屋さん頑張りすぎちゃってます。
このような人体構造を工業機械が模倣する術は現在の技術ではない
と思われますが、
もしも人体骨格を模した十分な強度のあるフレームが出来て、
実在する形式のアクチュエータがもっとフレキシブルになれば
戦闘ロボットは人間と同じように腕を曲げることができるのでしょうか?
(人工筋肉になるともうロボットではなくサイボーグの範疇なのでそれは考えません)
答えは無理っすね!としておきましょう。
理由1
筋肉のように収縮するときに力を発揮するようなものは
工業用アクチュエータにはなく、
モーターのような回転力か
油圧シリンダーのように伸びるものの2択です。
モーターは回転軸そのものに組み込まれますが、
軸自体が大きくなり邪魔をする。力も弱い。
油圧シリンダーは腕を曲げるときにシリンダーが伸びますが、
そのための空間が必要で
パワーショベルのように、シリンダーががらんどうの空間の中を伸びるか
あるいはシリンダーと一緒に装甲が出てくるとかでしょうが
いずれにしても曲げると肘内側がつぶれて密着するのではなく、
外側の空間が増えることになります。

上記は永野先生のモーターヘッドの腕の構造図ですが、やっぱり
縮めて曲げるという着想にならないので、厳密には人体構造と異なっています。
理由2
人体の腕は骨、靭帯、筋肉の他にあるのは血管と神経くらいで
腕の動きを邪魔するものがほとんどありません。
ロボットの場合は、人間と同じく肘を動かすアクチュエータは上腕に、
手首や指を動かすアクチュエータは前腕に配置されるのでしょうが、
それ以外に、それぞれのアクチュエータの出力や動きを調整する装置や
関節の状態をフィードバックするセンサーが必要でしょうし、
戦闘用のロボットであれば、
装甲板
手で握る武器とのリンケージやエネルギーの供給装置
その他固定武装
なども装備する必要があります。
戦闘用ロボット(というものが成り立つならば)は科学者の趣味で
腕を生やしているわけではないので、
腕が動いたり、物を持ったりするだけで喜んでいるわけにはいかなくて
それが攻撃力につながる必要があるからです。
したがって武器を持って使用したり、
遮蔽物から腕だけ出して敵を攻撃する
などといった事が有効な使い方というものです。
結論として腕にはフレームやアクチュエータ以外にも、
いろんなものを詰め込む必要があるので
人間のようには曲げられない、ということにしておきましょう。
理由3
やっぱりロボットの肘関節の内側がやわやわでぺちゃっとくっつくのは
気持ちが悪いというのが最大の理由です。
散々大騒ぎしましたが、結局はロボットが腕を曲げると、ガンプラみたいに
”何か”が中から出てくることになり、
『その”何か”を作る必要がある』という結論に至りました。
何?腕が曲がらない!それじゃあ
ドクターキリコ!安楽死はやめてください。
腕を切れば済むことじゃありませんか!
『戦場で手足をもがれ胸や腹をつぶされてそれでもまだ死ねないでいる悲惨なけが人をゴマンと見たんだ』

ドクターキリコが呼吸中枢をマヒさせる超音波装置をセットする前に退場していただきました。
これで安心して執刀できます。
まずは本日のクランケである右腕に手術台に上がってもらいます。
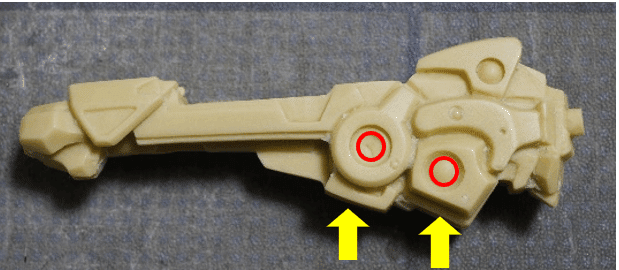
あー、なるほどね、どうしようかな?
全然曲がるイメージが浮かばない。
ガンダムと違って蝶番がどこかわかりにくいし、
蝶番っぽいところの内側にはどうみても動きを邪魔するような
ブロックが二連でついているし…
『おれに頼むなら今のうちだぞ!』
あーもうドクターキリコ(ネタ)はもう結構ですから!
マジでこのままでは埒があきません。
腕として最終的にどんな状態に組み立てられるのか腕のフレームにつく部品一式を見てみます。

手首、手首用アクチュエータ、腕の甲の装甲、上腕が付属品です。
これを取り付けると腕らしくなりますが、腕のフレームが装甲の間から見えるのはちょこっとだけですね。
では改めて、
組立状態をイメージしつつ、もう一度右腕フレームを吟味します。
(1)輪郭形状の特性にあわせて色分けをします。
①他の部品に隠れているところがピンク
もともと見えないところなのでここは形を変更しても構わないところ。
②装甲の間から露出しているところが水色
腕を曲げたからといって安易に形を変えることはできそうにありません。
③今は一体で成型されているけど、部品を削り取れば現れるであろう面が緑
設定上は別部品だけど、ガレージキットの都合で
一体になっているだけなので、ピンクの部分と同じく
少々の形状変更が可能。
なぜこの部品を削り取るかというと、腕を曲げるのに合わせて
位置が変わるという解釈です。
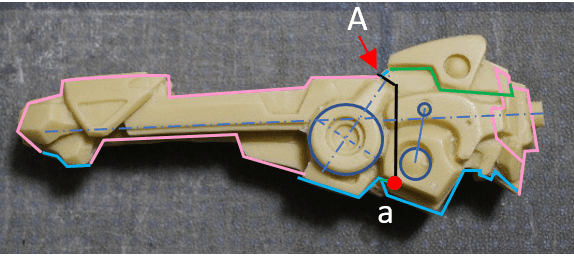
(2)切断線を決めます。
Aの黒線を切断線とします。
この位置にする理由は二つ
1)二つある蝶番の軸の中間に位置するので、腕が曲がる機構としてもっともらしい。
2)切断線より左(前腕側フレーム)は腕の甲の装甲に隠れている部分であり、腕を曲げることによって出てくる”何か”が格納されていることにしても辻褄があう。
(3)腕のディティールの調整
腕の中心線や主要なディティール位置なども補助線で示しておきます。
ちなみにこれらのディティールも複製部品からそぎ落として別パーツ化し、腕を曲げた状態に合わせて、取り付け位置や向きを微妙に変更します。
このようにすることにより、切断位置でカクッと曲がっているのではなく、腕フレームを構成する全部品が複雑に動いて腕が曲がっているように見えてくれれば良いのですが。
ちなみに複製部品から精密のこぎりでそぎ取ったディティールを
並べて見ると
ユニバーサルソルジャーで出てきたアンドリュー・スコット軍曹が
狂気に駆られて捕虜からそぎ落とした耳に見えてしまいます。

(4)腕を曲げてみます
腕は点aを中心としなければ曲げることができなさそうです。
曲げた状態がこの図
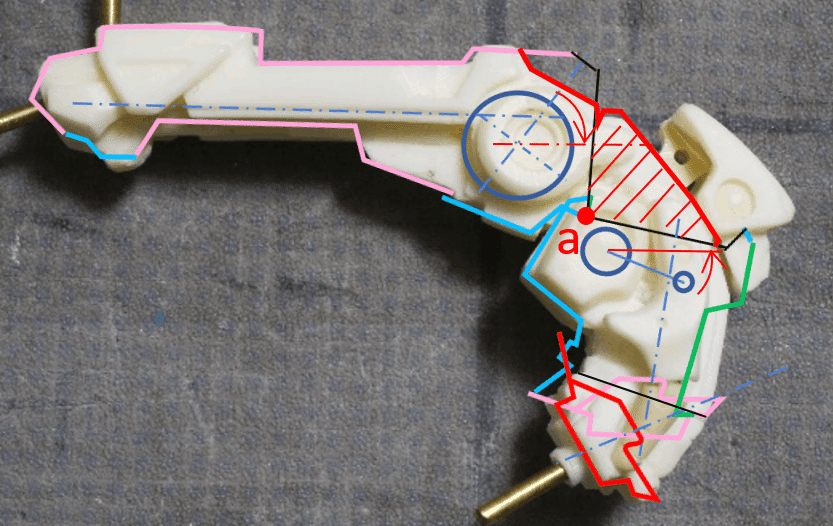
切断線でなんとか100°くらい曲がりましたが、内側のブロックどうしが干渉してこれ以上は無理。
それに曲げたことで、これまでは見えもしていなかった“何か”が現れました。この部分は赤線で描いたような形状に整えます。
腕甲装甲から現れた部分をのっぺりとさせないために、
緑色の部分の肘ブロックも切り取って前腕側に移動させます。
永野先生の構造図でも同様に、曲げると伸ばした時よりもこのブロックが前腕側に移動しているようです。
また腕のディティールも少し向きを変えたり、位置をずらしたりして
再接着し、側面ののっぺり感をなくすように努力しています。
ただし曲がったのが100°程度だと、前腕を前に突き出している程度で、
モビルスーツギャンの得意な構えのようにしかなりません。

ちなみにギャンも
騎士の鎧をイメージしたデザインと
フェンシングばりのビームサーベルでの突き専門の攻撃を得意とする点で、今回のルミナスミラージュのテーマと共通性があるのですが、
騎士道精神とは正反対の性格で人気のマ・クベ大佐がパイロットです。
レイピアの握り方はバットを握るようにはいきませんので、レイピアの先を上向きにして構えるためには、前腕を垂直近くに立てることになり、
更に肘を深く曲げる必要があります。

(5)さらに腕を曲げます
上腕への取り付け部が半分上腕装甲内に隠れていることに目を付け、
ここでも曲げを入れてやります。
複製した右腕フレームの上腕への接続部近傍を切り取り、角度を付けて右腕フレームと再接続してやるわけです。この際90°向きを変え、腕の側面ではなく内側が前を向くようにします。
こうして無事曲がった右腕が下の写真です

予想はしていましたが、肘を深く曲げるために、2か所で曲げを入れたため
ちょっと曲がり方がタラっとしてしまった感はありますが、まぁ設定画でも
そういうケがないわけでもないので、許容範囲といたします。
今はこれが精いっぱい!
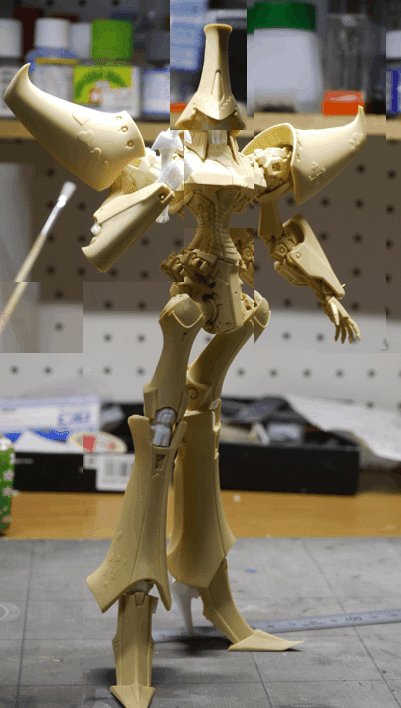
今の立ち姿
とりあえずこんな感じです。
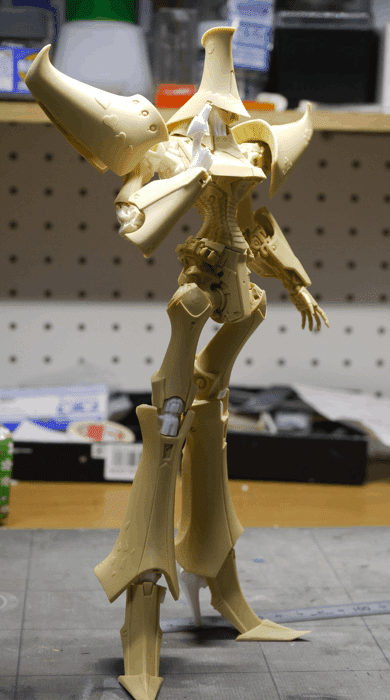
腕単独で見るよりも、思ったより右腕が自然に曲がっています。
でも今後の更なる改造により、
腹部と首でそれぞれ22.5°づつ、あわせて45°捻って、
顔は正面を向いていただく必要がありますので、
今はソッポを向いてます。
この腹部と首の改造は、ルミナスミラージュ製作の山場となりますが
まだ設計段階!まだまだ時間がかかりそうです!
待ちきれないので、いろんな角度から写真を撮って
実物より一足お先にモンタージュ写真で雰囲気を見て見ます。
(ちなみにモンタージュはイタリア語、”モンタージィオ”=組立が語源)
いや~、なかなか良いですね。うん。