
【実証実験試乗🚓】自動運転タクシーZMP

#自動運転 #ZMP #AutonomousTaxi #Robot_TechG #MaaS
#SDG9 (技術革新) #SDG11 (持続可能な輸送システム) #SDG8 (労働力不足解消)
ソフトバンクドライブ社のNAVYA ARMA(ナビヤ アルマ)に続き、ZMP社の「自動運転タクシー」に試乗🚘
水天宮の東京シティエアターミナルから丸の内へ、安定した運転に感動‼
空港リムジンバス・自動運転タクシー・自動運転モビリティの3つの交通手段を1つのスマホアプリ「Tokyo MaaS」から利用予約できる❗
https://www.zmp.co.jp/event/zmp-maas2019
使い方(自動運転タクシー):
<乗車前>
1)アプリで乗り物を予約
2)車体のQRコードを読み取ると、ドアのロック解除

<乗車中>
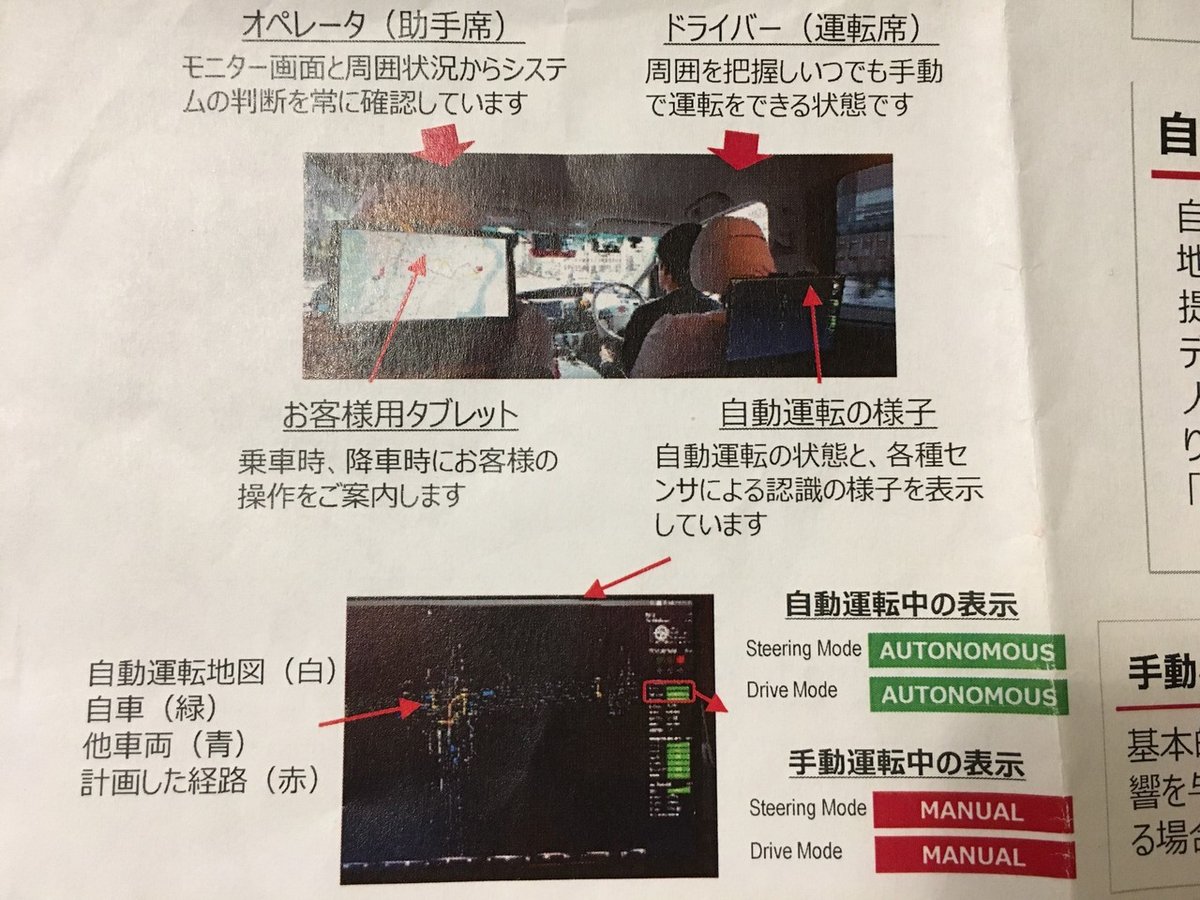
社内撮影不可でしたので、紙の写真で💦
どの位自動運転?:
右側のモニターに状況が常に表示され、緑の「AUTONOMOUS」が表示されている時は自動運転中。私達の乗車中の約7割が自動運転。
<実感したすごい!ポイント>
・前方車に近づいたら速度を落とす
・隣の車線の交通状況を見て車線変更
・大きい交差点を右折 横断歩道の子供をしっかり検知して停止
・急な割り込みに対し安全な距離で減速
・信号検出(カメラで)
など
使われている技術:
・LiDAR(Light Detection and Ranging、ライダー)センサー @車の上
レーザー光を対象物に照射してその散乱や反射光を観測することで、対象物までの距離を計測したり対象物の性質を特定したりする、光センサー技術。
→全周囲の交通や信号を認識
・カメラ @フロントガラス上部
単眼カメラ:白線・信号
ステレオカメラ:距離 2つのレンズを持ち、より正確な距離測定が可能
https://www.zmp.co.jp/knowledge/adas_dev/adas_sensor/adas_camera/adas_stereo
・車載ロケーター
自動運転の走行は、自車が自動運転用地図のどこにいるかを特定し、あらかじめ設定した走行ルートに従って進行。よって、自車位置を正確に測定する機器、ロケーターが必要。
従来はGPS衛星を元にカーナビゲーションなどが活用され、現在は車線単位での自車位置の特定が求められるため、ジャイロセンサー、車速測定などを活用してより精度の高い現在位置を測定。
などなど。詳細はこちら↓
https://www.zmp.co.jp/knowledge/adas_dev
会社名:
株式会社ZMP https://www.zmp.co.jp/company/info
使えるところ:
今後も実証実験情報が出ましたらアップします❗