
[ArduPilot] モーター出力のバランスを確認してますか?

ArduPilot に取り組まれている方は、機体を自作されている方が多いと思います。そして、色んなセンサーやカメラを搭載して、カスタマイズを楽しんでいるのではないでしょうか。
色んなセンサーを搭載していると重心バランスが崩れたりなどの問題も出てきますよね。
ArduPilot では飛行後のログも確認できますので、墜落時だけでなく正常性の判断にも活用していきましょう。
本記事ではモーターの出力のバランスについて確認します。
これはクアッドコプターを飛行させたときのモーター出力のログです。
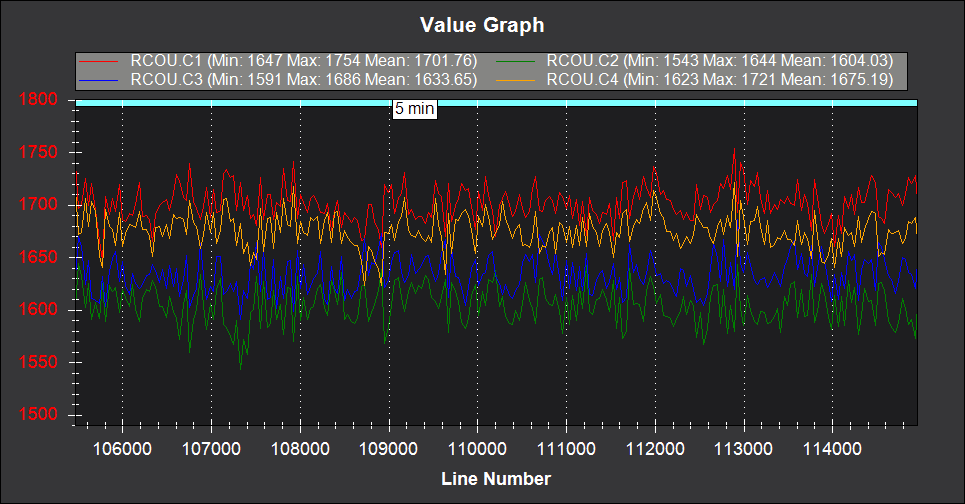
このログではモーター1と4番の出力が少し高いことが分かります。
C1、C2、C3、C4 は以下の絵のモーター番号となります。

1と4が高いということはロールを左に制御しようとしているということです。ここで、ロール、ピッチの値も確認しておきましょう。

右のスケールにロール、ピッチを用意しました。-1度前後です。左に1度傾いているという意味になります。この時はホバリング状態でしたので、ほとんど傾きは出ていません。
このログを見ると、重心が少し右に寄っているかも、ということが分かります。無風に近い状態でホバリングをしていれば、顕著に表れるでしょう。
クアッド以外のフレームのモーター番号の対応はこちらのリンクを参考にしてください。
実はここまでが前置きで、ここからが本題です。
上記のモーター出力を確認していると、対角線上のモーターの出力が増加するパターンもあります。CW の向きのモーター出力が平均的に高く、CCW の向きのモーターの出力は平均的に低いといった場合です。
これはヨーが釣り合っていないことを示します。この状態がどんどん悪化していくと、突然ヨーが回転しだすという現象が発生します。
絶対に発生して欲しくないですよね。ヨーが勝手に回ると、上級者でないとなかなか冷静に対応できないのではないかと思います。
無風状態のホバリングでバランスがあっていない場合には、ESCキャリブレーションをやり直す、もしくはモーターの配置(各モーターの推力のバランス)を再検討することが挙げられます。
モーターの正常性は常に確認しておきたい項目です。
例えば、乱気流によりバランスを崩し、モーターの出力が一時的に上がることもあります。そのような時にモーターのバランスが悪いと、特定のモーターのみ出力の余裕がなくなってしまい、そのモーターの出力上限に達すると機体の水平バランスやヨーバランスが崩れる可能性があります。
そのようなことを防ぐための方法として、Mission Planner を使用して、リアルタイムにモーターの出力もチェックできます。

また、最近ヨーのバランスがおかしい場合にメッセージを出力する機能も追加されました。

上記の写真では CW のモーターのみ出力が高いため、「Yaw Imbalance xx%」というエラーメッセージを表示し、ヨーのバランスが悪いことを指摘しています。
ヨーのバランスが悪くても、フライトコントローラーの制御によって綺麗に飛ぶことができ、見逃される可能性のある問題であったため、このようなメッセージを出してくれるのは非常にありがたいです。
何か問題が発生してから気づくのでは手遅れなため、正常に飛行できている場合にも、予兆があれば警告する機能はどんどん増やしていきたいです。