財布と知識よわよわマンのためのぽてとら入門

長い結論だけ読ませろ(TL; DR)
販売ページの説明書を読んでください
PCにトラッカーを接続する際は以下に注意。
必ず1個だけ接続します。
絶対にSlaveトラッカー(ポート1個だけのやつ)は接続しないこと
トラッカー群を起動する時は、トラッカー全部接続→電源接続。
各種キャリブレーションをやるとストレスが減ります
「6軸キャリブレーションについて」
「ドリフト補正」
Re: 貯金ゼロから始めるフルトラ生活
初めまして、駄犬と申します。最近悪めのKnownになってる24年7月勢VRChatterです。
皆さん、VRChat楽しんでますか?私は楽しんでます。
ところで皆さんはフルトラをご存じです。実際こんな記事読みに来る時点で知らない訳がないんだよなアバターがめちゃめちゃ実在感増す代わりにお財布とリアルアバターに多大なダメージを与える魔の装備です。
基本的にはVIVEトラッカーとかHaritoraX、mocopi、最近だとrebocapなる中華製のトラッカーなどがちょこちょこ選ばれてる印象です。が、これらは軒並み安くても3万以上とちょっと手が出しにくい。
そんな中私は「ぽてとら」でフルトラデビューしました。
ぽてとらは「安く手軽にフルトラ」という目的でぐっちーさんが販売されている、格安な同人IMU式FBT用トラッカーセットです。
お値段何と驚異の12,000~13,000円。Boothを覗く度金銭感覚が狂うと評判のVRChatter諸兄におかれましては、この値段が相当破格であることは私が言葉に尽くすまでもなく自明と理解していただけると思われます。
さてこのぽてとら、格安でフルトラになれる素敵選択肢なのですが、もちろん低価格なだけにいくつか注意点があります。
導入時のトラブル対応は(初期不良などを除き)自己責任で対応
精度向上・ズレ抑制のための6軸キャリブレーションは未実施
専用ベルトではないので装着感やトラッカー自体のズレ防止は不十分
各トラッカー同士の接続は有線なので、運用上いくつか制約あり
電源は外部接続(モバイルバッテリー)
3~5については、どうしても低価格帯で実現されている関係で如何ともしがたい部分なので、それが嫌ならもうちょっと頑張ってHaritoraXとか買いましょうね、という部分です。
1、2については使用者自身の知識やggr力、ちょっとした手間で十分解消できる部分です。正直値段と精度を考えるとこれくらいはペイできないといけない、という部分ですね。
とはいえども、身近にフルトラ民がいるとどうしてもすぐに飛びつけるFBT用トラッカーとして「ぽてとら」を選んでしまう心情も理解できます……というか私がそうでした。
しかしながら、
導入の手伝いなどのサポートは行っていないこともご理解ください
と明言されているにもかかわらず、ぐっちーさん自身非常に多忙な方とお見受けする中で親切にも対応されている姿が散見するので、「ぽてとら」の優秀さに惚れてしまった私がせめてもの手助けになれば、ということでこの記事を書きました。
簡単(当社比)導入ガイド!
と言っても、基本的にはぐっちーさんが読めば分かるガイドを用意されています。Boothの販売ページに置かれている説明書に大体のことは書かれているので、こんな雑魚雑魚記事読んでる暇があったらそちらを見て下さい。
なので、ここではガイドを読んでも分かりづらい箇所・こうした方が無駄が少ないよ♡という内容を記載します。
日本語化について
ガイドの中では
※アプリの起動時、アプリの設定画面一番下に日本語の選択が あるので日本語化をおすすめします。
とあるのですが、多分初手はセットアップウィザードが開いているはずです(私の記憶が正しければ)。
ウィザード最初の画面では右下に言語選択があるので、そこから日本語を選んでください。
トラッカーの割り当てについて
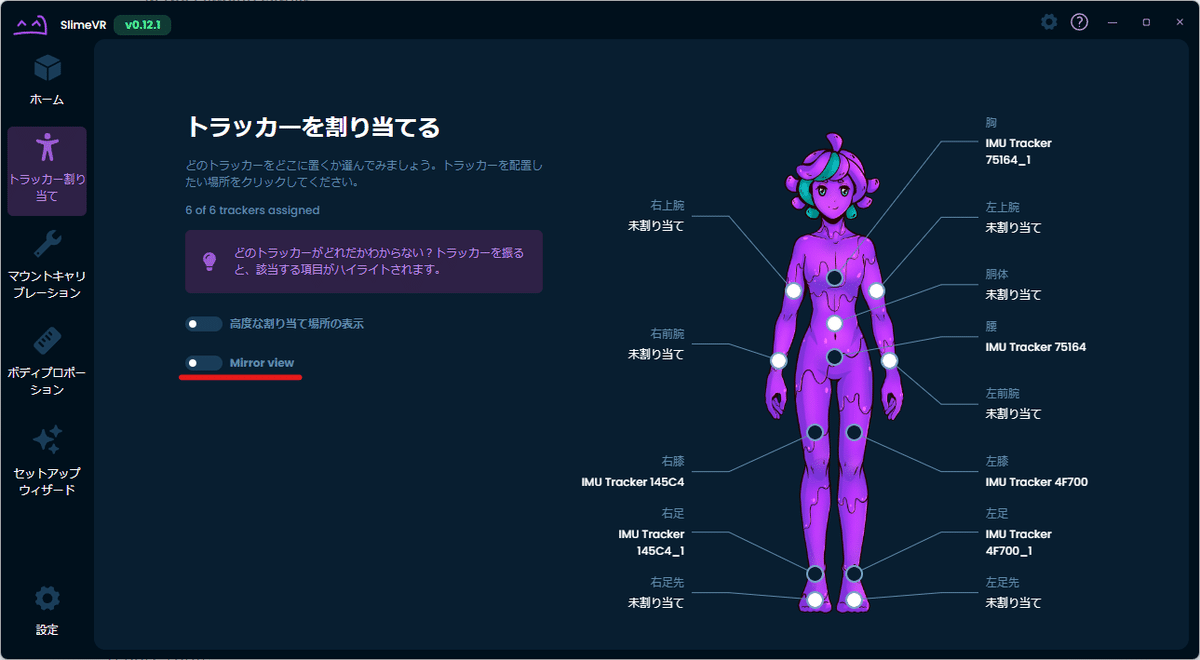
各トラッカーをSlimeVR上でどの箇所かに割り当てる際、デフォルトではMirror Viewがオンになっています。これがオンの時、右側の割り当て場所が全て見ている方向とは逆になります。
右側にスライムガールがこちらを向いた状態でいると思いますが、そのまま見れば「右膝」であるはずの場所が「左膝」になっていると思います。
画像に対して反転した位置に割り当て箇所があり混乱すると思うので、該当設定はオフにしておくと逆に設定してしまうことが避けられると思います。
SlimeVR接続後のリセットについて
ガイドの流れでは飽くまで必要最低限で使えるようにするフローを書かれているのですが、正直なところ「リセット」だけだとかなりドリフト(実際の配置位置とトラッカーのズレ。IMU式トラッカーの場合避けられない現象)が溜まりやすい傾向にあると感じました。
かなり正確に装着すればリセットでも問題ないとは思いますが、マウントキャリブレーションも別に面倒な訳ではないですし、する際に一緒にリセットも行われるので、とりあえずマウントキャリブレーションしておくといいと思います。
SlimeVR上では「マニュアルマウント」が推奨!となっており、「自動マウント」は実験的な(Experimentalの機械翻訳しただけだと思いますが、要は試験的機能)と表現されています。が、ぶっちゃけ自動マウントでいいです。
6軸キャリブレーションについて
6軸キャリブレーションするといいよ!という文面を散見すると思います。が、6軸キャリブレーションの仕方は詳細には書いていないですし、SlimeVR公式は英語なのでうわっとなるかと思います(翻訳かけてもいいですけどね)。
ぽてとらに使われているIMUは現状BMI270なので、SlimeVR公式の文章に従えば以下の方法で行うことができます(以下の説明はトラッカーを直接PCにつないでいる前提です):
最低限Master、Hostトラッカーを全てつないだ状態で電源投入し、20分程放置しておく
定常動作温度に近づけるためです。
SlimeVRの設定→シリアルコンソールを開く
各トラッカー(ぽてとらではMaster、Hostトラッカーが該当します)を裏返しにした状態で電源投入
どちらが表か分からない場合、上向きを示す「>>」マークがある方が表です。
もしくは、USB-Cのポートの説明がない面が表です。
「Flip over to ….」という文字列が見えたら表に返す
各種キャリブレーションが開始される
この間はトラッカーを動かさないで水平にしておきます。
どうしても水平にならない場合は、動かさないように押さえつけてください。
「Recorded. Waiting Position 2…」などの文字列が見え始めたら、面を変えて固定する
最初の1面だけは他キャリブレーションの続きで出来ます。
各面の記録終了ごとに「Recorded. Waiting Position x…」が出るので、それに従いましょう。
6面分採り終わったら「~… not AC pin!」みたいな文字列が出るまで待機
電源を抜いてSlaveトラッカー以外の任意のトラッカーに接続を変更。
Slave以外の全てのトラッカーが完了するまで、以下2から繰り返し
シリアルコンソールを見ている前提で書いていますが、タイミングを完全に把握できれば多分普通に電源入れるだけでも出来ると思います(SlimeVR公式を見る限りでは多分出来る)。が、その場合LEDインジケータのみで全てを把握する必要があり、そんな芸当できるならこんな記事読んでないと思うので、原則PCに接続してください。
また、先述しましたが、PCに接続する際は
必ず1個だけ個別に接続して、各トラッカーごとに行う
絶対にSlaveトラッカー(ポートが1個しかないトラッカー)は接続しない
を徹底してください。
ドリフト補正
Make sure that when you turn on your tracker it's lying on a flat surface. The sensors need to calibrate for 20-30 seconds in a stable environment. This should be done every time you turn on your trackers, failing to do so will result in an increased rate of drift.
(トラッカー起動時、必ず水平面に置かれていることを確認してください。センサーは安定した状態で20~30秒間のキャリブレーションを必要とします。これはトラッカー起動ごとに行われるべきで、そうでない場合はドリフトの頻度が増加します。)
とある通り、6軸キャリブレーション以外にも毎起動時に水平面に設置しておいて30秒程寝かせておくといいと思います。
実際初回は早くフルトラになりたくてマウントキャリブレーションくらいで終わりにしましたが、6軸キャリブレーション + 起動時ドリフト補正をやり始めてから明確にズレが抑えられている気がします(定量評価はできていないので体感ですが)。
ただしバンドやケーブルのテンションなどでかなり広い机か床とかじゃないとなかなか平べったく置くのは難しいと思います。この場合、後述しますが立体的な配置が出来る穴あきの台などを使うと多少楽です。
以下書きかけ
忘れてるなと思ったら駄犬をたたき起こしてください。こいつはよく書きかけで忘れます。