
【eカート】シルバーカーを電動化してみた!ライバルはテスラ!!

どうも、みなさん、こんにちは
シンギュラリティソサエティの白木と申します。本日は、eカートというものを作ってみたので、紹介させていただきます。
はじめに
自己紹介をさせていただきます。1987年に就職しましたが、失われた30年を経て、2018年にシンギュラリティ・ソサエティに参加しました。
シンギュラリティ・ソサエティーとは、中島聡さん、夏野剛さんの呼びかけにより設立された、「未来の創造者」たちに、勉強・議論・情報発信・ネットワーク作り・プロトタイプ作成・ビジネス設計・起業の場を提供することを目的に作られた非営利団体です。
仕事のかたわらbus2.0(MaaSプロジェクト)、最近話題になってます乗合バスのシステムですとか、そこから派生した写真アプリなどお手伝いさせてもらってます。
仕事ではC言語とかCOBOLとかシェルとかOracleとかがスキルになりますが、シンギュラリティソサエティでは新しめの技術を身につけさせてもらってます。
1987年 H社系列ソフトウェア会社入社
失われた30年
2018年 シンギュラリティ ソサエティ参加
MaaS Project, Photo App
Git, GitHub, React, Vue, Firebase, Firestore, Flutter, Riverpod, RaspberryPi, iOS, MicroPython, Solidity ...
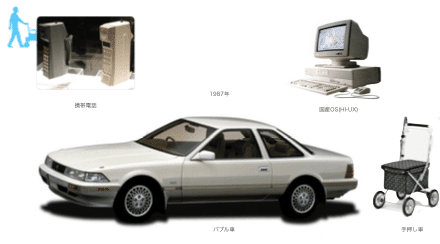
これは昔(ザ昭和)の写真です。携帯電話は大きなもので高嶺の花でした。日本が元気だった頃は、国産のOSを作ったりしたんですけど…
みなさん知らないでしょうが、国産のUNIXワークステーションって、結構あったんです。

はい、現在です。携帯電話は持ってない人が珍しいですね。国産OSは淘汰され、Windowsは11になりました。バブルではありませんが、勢いのある車といえばテスラですね。
シルバーカーは昔からあまり変わってません。歴史的には乳母車から派生したとのことです。田舎のおばあちゃんが、乳母車で赤ちゃんの世話をした後も畑仕事で使ってたり、重りを積んで歩行の補助にしていたのを見て、もう少しお年寄りに特化した手押し車があったほうがいいんじゃないかということでシルバーカーができたそうです。
映画の世界では2015年に空中を行き交う乗り物があるわけですが、便利すぎるとこのような体型になってしまいます。
そこでeカートです。本題に入ります!
こちらの動画(下記動画)をご覧ください。

タイトルにある通り、シルバーカーを電動化してみました!!
未来の乗り物のように肥満にならないための車両となります。シルバーカーは多分、日本固有の車両でお年寄りが無理なく外出できるように開発されました。しかし、坂道は厳しいですよね。電動化することにより、登り坂も下り坂も楽になりますので、かなり行動範囲が広がるような気がしています。私もシルバーカーを使っても違和感ない年になってきたので試しに使ってみたのですが、実際便利です。若い人にも使ってみてもらいたいと思っています。スマートフォンは電話の再発明。
「eカートは車の再発明となります」

上の写真は私の家の近所で、私の家はこの先にあるのですが、なかなかこっち方面に出かけるのは勇気が入ります。というよりバスに乗ってこっちをずーと回って、帰ります。登ったほうが健康には良いのですが…。お年寄りになると結構厳しい。移動は大体、車かバスになると思います。あと、最近では、電動アシスト自転車が多くなっています。
ここにもう一つ選択肢としてeカートの需要があると思い、制作しました。実際、この坂を登るたびいつもため息をついていたのですが、eカートで何往復もできるようになりまた!(実体験)
制作方法

バランススクーターを流用できるんじゃないかなーと思って、とりあえずヤフオクで中古のバランススクーターを買いました。これ、ミニセグウェイとか呼ばれているようです。「ミニセグウェイ改造」でググると結構乗り物にして楽しんでいる方が多いんですね。なんとかシルバーカーにくっつけてやればお年寄りでも安定した歩行ができると考えました。
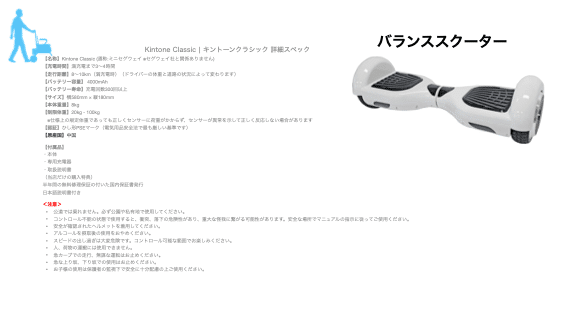
ベース車両です。本体重量8Kg結構重いんです。
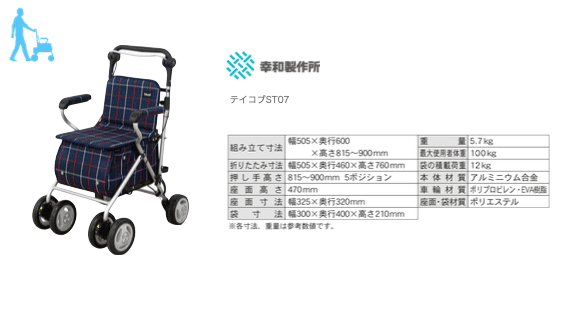
ベース車両です。ザ・シルバーカーって感じです。
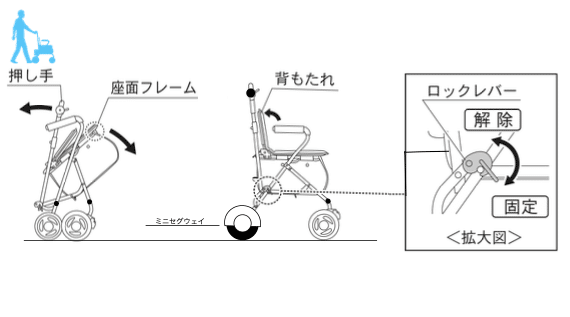
このミニセグウェイをこんな感じで組み合わせることを考えました。が、この構成ではなかなか、うまく接合できないのと、ミニセグウェイの幅が58cmなのですが、ちょっと広すぎる。
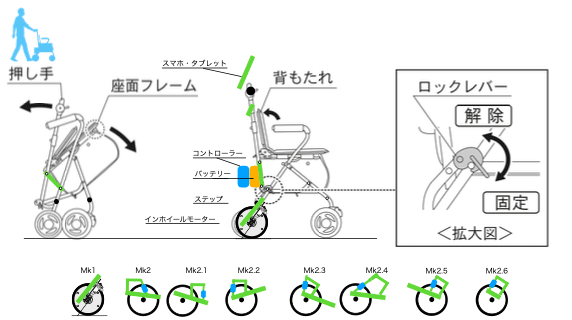
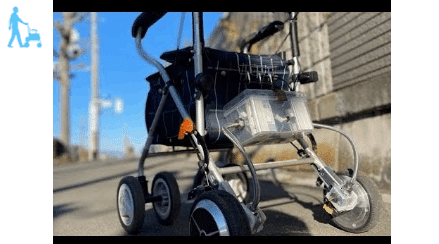
結局、ミニセグウェイをバラして、モーターを直接本体に取り付けることにしました。これにより、58cm → 約50cm(50.5cm)になりました。
バッテリーはミニセグウェイのものを流用しましたが、コントローラーは中国製の汎用的なものにしました。一旦この構成で完成したので、シェイクダウン(走行テスト)をしたのですが、どうも古いアスファルトとか路面が悪いと振動がものすごいので、対策としてサスペンションを追加することにしました。色々とレイアウトを調整して、(アイアンマン風のバージョンで)マーク1からマーク2.6まで試行錯誤して、ようやく納得がいく構成になりました。サスペンションを追加することで、かなり振動を抑えることができました。
また、バッテリー、コントローラーを外出しにしたことで応用が効くようになりました。

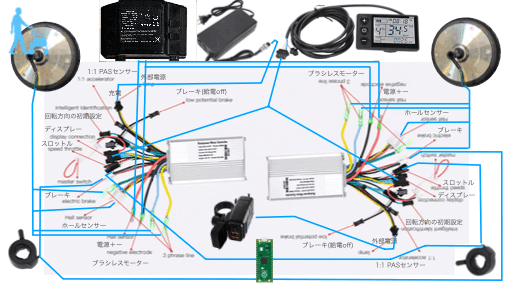
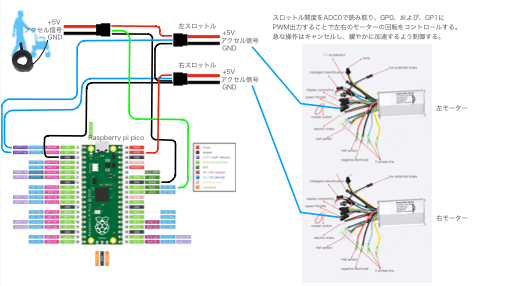
こちら、構成図になります。モーターとモーターコントローラー、サスペンションを2つづつに対してLCDディスプレイが一つ、ブレーキ、スロットルセンサー、バッテリーとUSBとなります。最初は1つのコントローラーでなんとか2つのモーターを制御できないか試していたのですが、どうしても脱調という症状が出てしまいまして、モーター毎にコントローラーを用意することで滑らかに回ってくれるようになりました。
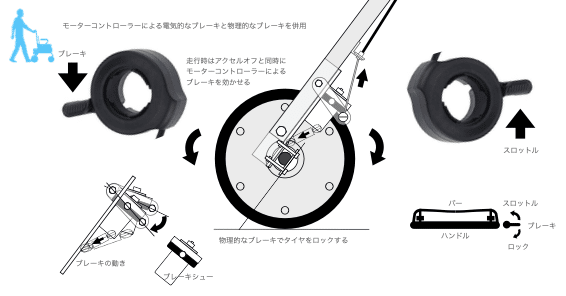
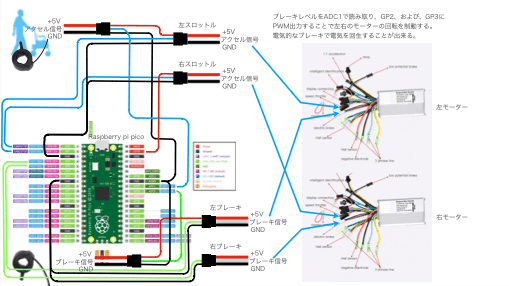
スロットルとブレーキは一つのハンドルバーに互い違いに設置されています。これにより、スロットルのレベルが上がるとブレーキのレベルが下がります。ロックの状態では物理的なブレーキがかかるように調整しています。
また、中国製のコントローラで電気容量を表示できるのですが、下り坂や長い時間走っていると、ほんの少し容量がアップしているのがわかります。回生ブレーキになっていますね。
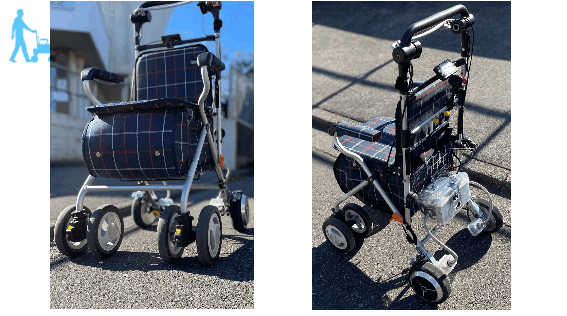
これは、マーク1です。

サスペンションを付けたマーク2.6です。
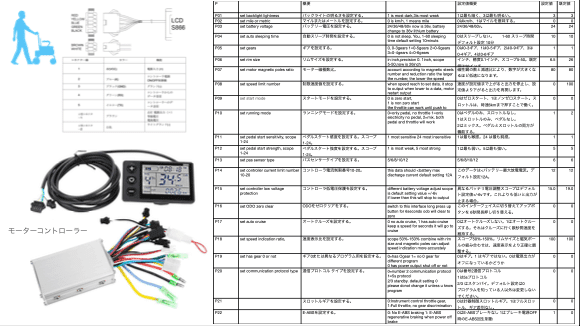
中国製コントローラー。たくさん機能があります。
説明書がないのでネット情報を集める必要があるのですが、結構使えます!!
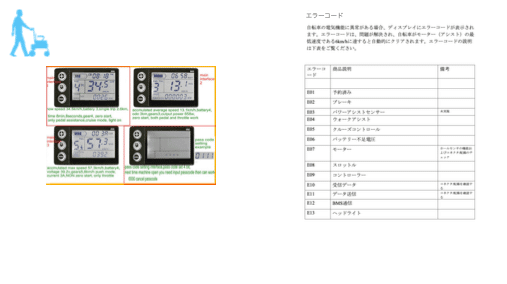
表示例です。バッテリー残量とか、ギア、速度などが表示されます。エラーコードで不具合も確認できます。
実はバッテリー残量もスピードも実際と異なる表示になります。もともと電動自転車用のコントローラーなので調整が難しいんです。
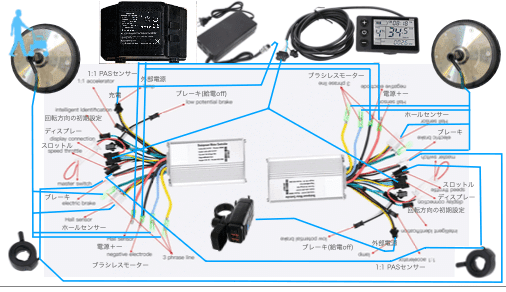
ザクっとした配線になります。
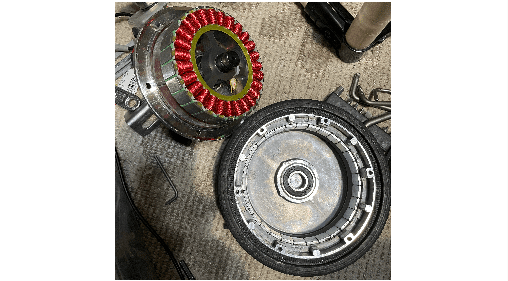
モーターの中はこんな感じになっています。いわゆる、インホイールモーターとかハブモーターというやつです。
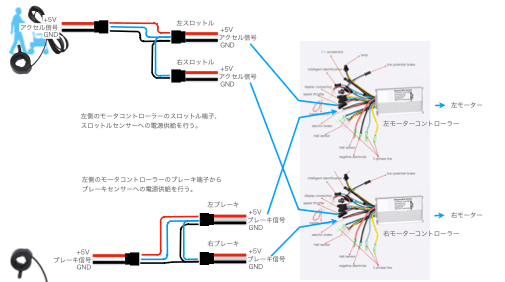
アクセルとブレーキの配線です。ここまでで電動化の機能としては完成ですが、問題があります。アクセルがかなりセンシティブなのです。
もともとが自転車用なので、ちょっと強めにハンドルを握ると、ウィリー状態になります。こんなことにならないよう制御が必要です。
はい。ここにRaspberry Pi Pico。マイコンを使って制御します。これは小さいながらアナログ入力とPWM出力ができるので、0.1秒間隔で急なハンドル操作(急激な操作)があった場合はキャンセルするようにしています。
それにより、ジワッと握るとジワッと進む仕組みになっています。
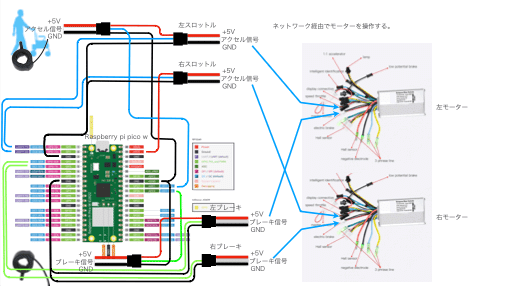
Raspberry Pi Pico wを入手したのでeカートもネットワーク対応となりました。どういうことかというとこのスマホでeカートをコントロールできます。
すみません。動くまで行きませんでした。
eカートの未来の形
ココからは妄想なのですが。
スマホ経由でインターネットに接続できるので、出来ることが色々考えられます。
例えば、徘徊老人の位置を確認することができ、いざと言う時に役立ちます。また、どうのように行動したか家族にわかるようにして、コミュニケーションツールにも持って行けるのではないかと考えています。
専用のIoT機器を開発して、いろいろ繋げたいと思います。ここにも書いていますが、eカートはソフトウェアによるアップグレードが可能なプラットフォームにしたいと思っています。なので、競合はテスラになります。
さらにカー・ドローンです。ある程度の自立運転と遠隔操作で荷物を運んだり、迎えに行ったりできるんじゃないかと
こうなりますね。

近所のテスラと2ショット。

やはり、SDGsは意識していますよ。3番当たりが一番該当する感じですかね。
・3 すべての人に健康と福祉を・・・eカーでみんな健康に
・8 生きがいも経済成長も・・・eカーで行動範囲が広がる
・9 産業と技術革新の基礎を作ろう・・eカーは新しいプラットフォーム
・11 住み続けられるまちづくりを・・・eカーは人と街に負荷をかけない
・12 つくる責任、つかう責任・・・eカーをサステナブルな産業に
・13 気候変動に具体的な対策を・・・eカーはCO2を排出しない
以上です。
『Maker Faire Kyoto 2023』に出展!!
ご興味のある方は、是非体験しに来てください。
名称 Maker Faire Kyoto 2023
日時 2023年4月29日(土)12:00~18:00(予定)
2023年4月30日(日)10:00~16:00(予定)
※入場は終了の30分前まで
会場 けいはんなオープンイノベーションセンター(KICK)
入場料 前売:大人 800円、18歳以下 300円
当日:大人 1,000円、18歳以下 500円
あわせて読みたい