
なでとは(その3)

「なでとは、三次元空間内の手の移動のこと」
自己紹介
どうもこんにちは。Sea take(しいたけ)と申します。
はじめましての方もいると思うのでなで関係のプロフィールを書いておきます。読んだことある方は飛ばしてください。
・2021年の5月頃から「なでなで集会」というワールドに参加者が集まって なでなでし合うイベントを開催しております。
Discordで開催日の連絡をしてます。https://discord.gg/DtV7YFznCU
・なでのレベルはなで系イベントキャストくらい。
・コントローラーはContact Glove使ってます。
・肘無しの9点トラッキングです。
はじめに
今回のサムネは一人で練習するときに使う道具「ひとりじょうず」です。※発案者は私ではないです。
理屈・概念の要素が強い内容となっており、難しいので今後予定が空いた際に補足のハウツー要素強めの記事を出す予定です。
本編
なでの動きとは
「なでとは、三次元空間内の手の移動のこと」とはどういうことか解説していきます。
なでには様々な動きがあります。たたく、なぞる、ゆらす、おす。など…
なんとなく、縦の動き・奥行きの動き・手首の回転だっていうのは感覚的にわかると思います。
今回のnoteで、感覚的にではなく、理論的にはどう分析すれば良いのか、新しい動きの作り方を解説していきます。
三次元空間とは
はじめに…
この章の話は大体、高校とかで習う話です。厳密な理解を求める方は「6自由度」とかでググってみて下さい。
なではどのような動きが集まっているか考えてみると、なでは移動と回転でできていることが分かります。移動と回転はそれぞれxyz方向(左右・前後・上下)の3つのパラメータでできています。
xyzの移動と回転は3次元空間内で物体が取りうる動きの自由度です。
これは「6自由度」という概念です。物理屋・機械屋さんが学校で習う初歩的なことです。
三次元空間は横方向をX軸,奥行き方向をY軸,高さ方向をZ軸で表すことができます。(下の図の赤・黄・青)これだけだと三次元空間内の位置しか表せないので、XYZにそれぞれ回転の軸が加わります。(下の図の緑・水色・橙)
XYZをよくある形に表現すると左右・前後・上下です。

なでは、VR空間=三次元空間上の動きなので上記の考え方をそのまま当てはめることができます。
三次元空間の考え方をなでに落とし込むために
上の考え方は、点がどう動くかの話です。しかし、手は立体で点が無数に集合したものです。
なので、なでる手を三次元空間に落とし込むためにはどこか特定の点に注目し、その点がどのように動くか考えます。
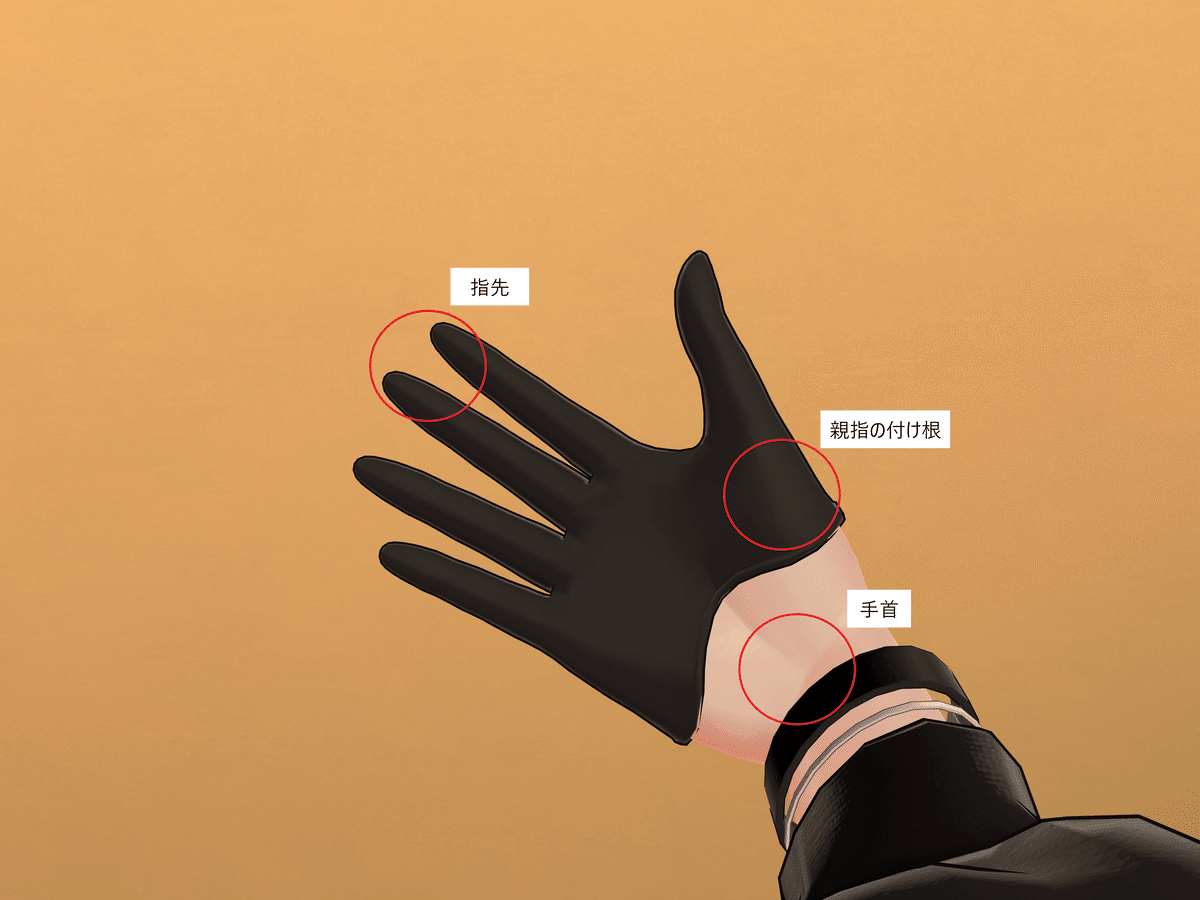
手の部位を整理して、手の中の特定の点に注目します。その点を、ここでは「注目点」と呼びます。
例えば、よくとられる注目点は
親指付け根
指先
手首
があります。
注目点を決めれば、あとはその注目点をどの軌道で動かしたいか。どのような回転を加えたいか考えます。
注目点を増やせるとバリエーションが増えます。分かりやすい事例で言えば、「指の手の甲側で頬を撫でる」これは指の手の甲側を注目点とすることを発見できたから得られたバリエーションです。
三次元空間の考え方の活用
今のなでの動きが三次元空間のパラメータでどのパラメータの動きで成り立っているか観察します。そして、使っていないパラメータを試しに入れたり、あえてパラメータを減らしてみます。
三次元空間のパラメータで考えるようになると何が足りていないかとか、このパラメータしか使っていないから単調な動きになっている。とかが分かるようになります。
縦方向ばかりなでていたら横方向も、右から左にばかりなでていたら左から右も試してみましょう。ということです。
まとめ
なでの動きはxyzの移動と回転である。
手は立体なので、注目点を決めて考える必要がある。
バリエーションを増やすには、使ってない動きを活用しよう。
編集後記
前回までは誰にでも分かる内容から記事を作成しておりました。今回は、難しいけれどSea takeの技術の重要な内容を記事にしています。
また、補足記事を出す予定ですが、記事だけではよく分からなかったという方で、もっとよく知りたい方は、なでなで集会とかに来ていただければ対面での解説をさせていだだきます。(執筆時点では暇なので、ぜひ来ていただければ)
今回で、動きのパラメータは説明できましたが、次回は手を動かす速さに関するnoteにする予定です。
参考サイト(本noteが難しかった方向けに)
6自由度のことについて
https://www.marine.osakafu-u.ac.jp/phenomenon/6%E8%87%AA%E7%94%B1%E5%BA%A6/
機械屋的な考え方
本noteの考え方とは違いますが、3次元空間内で手が取りうる動きを解説している点で同じ種類の話です。こちらの考え方の方が馴染む方もいらっしゃると思うので、本noteがよくわからなかったらこちらも見てみてください。
手の取りうる動きを回転軸に着目した考え方です。https://www.yasnaga.co.jp/techinfo/automation-information/robot-flexibility/
