
ドローンの教科書 徹底解説 回転の動き

こんばんは、尾張一宮ドローンサークルのさとぴかです。
いつも読んでいただき、ありがとうございます。
今回もドローンの教科書について徹底的に解説していきます。
前回の解説でドローンが前後左右に動く原理はなんとなく分かったかと思いますが、ブレードの回転に強弱をつける事によって自在に空を飛ぶ事ができます。
では今回はラダー(旋回)の原理についてお話しします。
ドローンの教科書 標準テキスト、16ページを開いてください。
持っていない人はこちらをご覧ください。

第2章 2-2 回転の動き
まずこちらの絵をご覧ください。
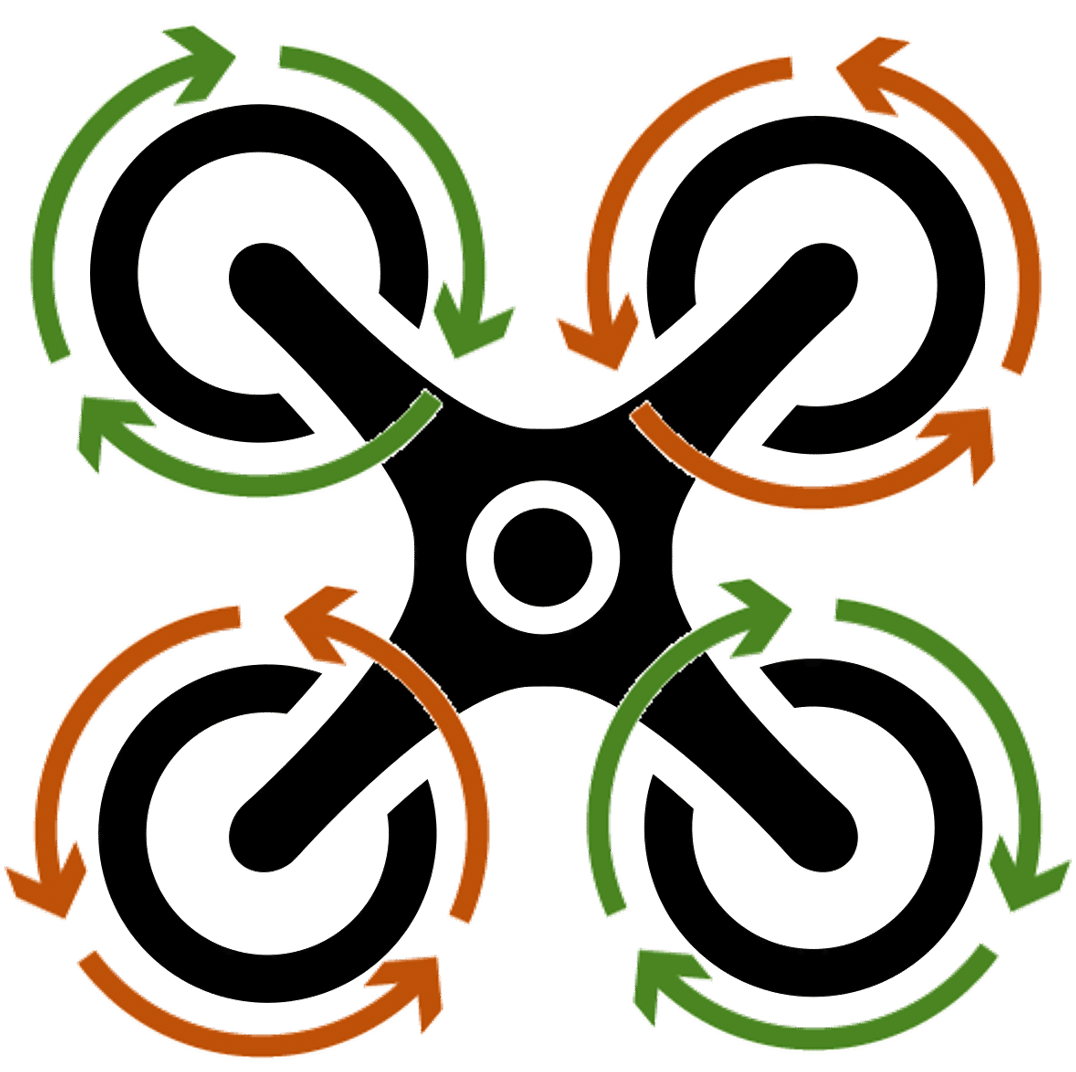
このようにマルチコプターは隣り合うブレードが逆回転となっています。
ブレードが回転すると、ブレードが回転する力と同時にマルチコプターの機体そのものには逆向きに回転させようとする力も同時に発生します。
これを「反トルク」と言って
もしすべてのブレードが同じ方向に回転してしまっては、ブレードが回転することで発生する反トルクによってマルチコプターはグルグルと回転してしまい制御不能になってしまいます。
(そもそも離陸できていませんが、、)
そこで、ドローンでは相対するプロペラの回転方向を逆にすることで、反トルクを打ち消し、機体をまっすぐに浮上させることができるようにしています。
1つのブレードで発生した反トルクは、その隣にあるブレードが発生する(逆向きの)反トルクによって帳消しにしてくれるという訳です。
このブレードの回転の強さと反トルクの力が釣り合っている状態になるとマルチコプターはホバリング(空中で静止する事)する事が出来ます。

この記事が気に入ったらサポートをしてみませんか?