
在来機との比較で見えるドローンの未来

有人ドローンに未来はあるのか(後編)
シコルスキー人力ヘリコプター賞獲得したカナダのAtlas号
この前編では内藤晁さんの人力ヘリコプターYURI-1がホバリングするに必要とした、エネルギー収支のことを考えてみた。同機がシアトルで当時の滞空時間世界記録を樹立したのは1994年3月7日だった。
その21年後の2013年6月13日にカナダのチームがAtlas号をもって、64.11秒最高高度3.3mの偉業を成し遂げた。100[m^2]の平面空間に留まる操縦に関しては機体構造の柔らかさに着目し体重移動で行える方法をとったが、基本的な形態はYURI-1がベースになっている。
Atlasのロータ半径は10.2mで、回転面の面積はYURI-1の4倍あるが、パイロット込みの飛行重量は124kgでYURI-1のなんと1.4倍で済んでいる。まあ骨組みだけの機体ではあるが、それにしても2乗3乗の法則が霞む快挙だと思う。

fig.01は両機の比較だ。Atlasはロータ回転面の面積を4倍以上にして必要な誘導速度(吹き下し)を減じ、供給しなくてはならないエンジン出力(脚力)を下げた。地面効果が得られない40m以上の(ロータ直径の)高度であっても、無風の環境があるのなら十分ホバリングできる機体性能を持っている。
Atlasは最高飛行高度3.3mに到達しているが、それでもそのロータ高さはロータ直径の0.08であり、どっぷりと地面効果の恩恵を受けている。本稿前編で特別な訓練を受けた超人で1.2馬力(900Wワット)ほどが限界らしいと書いたが、実飛行環境でのヘリコプター効率の悪化があっても、シコルスキー人力ヘリコプター賞の要求値を余裕をもってクリアーすることができたのだった。

小型実用ヘリコプターのホバリング性能
飛翔体が垂直に離陸して空中にホバリングすることのイメージが解っていただけただろうか。人力ヘリコプターの次は小型のヘリコプターのことを見ておきたい。

題材は4人乗りのレシプロエンジンのヘリコプターでR-44だ。多分業界では一番安価な部類に入ると思う。
4人搭乗して全備重量1066kgでホバリングする。ロータ直径は10.1mであり、人力ヘリコプターで考えた同じ手法で必要な誘導速度などを計算する。

R-44は実用機と云うよりはレジャー機と云った方がよいほどに狭くて、4人乗ったら荷物もほとんど積載できないだろう。またロータのサイズは地上などでの取り回しだけでなく、前進飛行などのことも十分考慮して決められている。さらにはエンジン故障時のオートローテーション着陸も想定しなければならない。その結果が5.05mのロータ半径だ。
実用ヘリコプターR-44の場合、飛行重量で人力ヘリコプターの10倍、誘導速度もAtlasの10倍だが、必要馬力は100倍になっている。
有人ドローン(クワッド機)
そこで有人ドローンの有償飛行を想像してみる。操縦者が1人で客が3人の機体が最低の?最大の?機体条件になるのだろうか。そうそう「ドローン」は「無人」であり「有人」と冠するのは違和感があると指摘する人がいた。まあ用語の定義は時節柄タイミングよく決めた者が正義なんだろう。そこからはみ出るのは違和感があるらしく「有人マルチコプター」にして欲しいと書かれていた。そのへんの用語の成立過程は注目しておらず知らない。雑多な呼び名や定義があるようで内閣官房の広報など見ると「航空機、空飛ぶクルマも含め一体的な”空”モビリティ」などとよく分からない。私が使った「ドローン」は従来の飛行機やヘリコプターに収まらないカテゴリーの飛翔体ほどの意で、「有人ドローン」とはそんなドローンの人搭乗型バージョンである、そんな想いで選んだ言葉でありお許し願いたい。
以下の図表は令和4年6月21〜23日に幕張メッセで行われた「第1回次世代エアモビリティEXPO 2022」において、その最終日最終講演の資料をお借りした上で、私のフィルターで一部捕捉説明を加えた。
その講演者はAIRCRAFT OLYMPOS社の社長 四戸 哲さんだ。あの有人メーヴェを設計製作し依頼者の飛行訓練から飛行試験、そしてオシコシでの展示飛行まで、完全サポートをなした人と会社と云えば思いだされる方がおられよう。
以下の図表でOLYMPOSのロゴ入りはオリジナルのままだ。

レシプロの実用小型ヘリコプターのロータ回転面の面積と同じ面積を、クワッド機の総ロータ回転面に持たせた場合の平面図だ。人力ヘリコプターで考えたのと同じで、エネルギー損失のない理想状態の計算であり、「エネルギー消費率(一応)同等」とされている。ここの「一応」の意味は理想状態でない現実ではヘリコプター効率が違う、つまりロータ径の短いクワッド機は翼端損失の割合が大きく効率が悪くなるとの意味だ。
さてその両機を重ねてみるので大きさを実感してほしい。

クワッド機の対角線上それぞれ遠方にあるロータチップ位置までの距離は15mほどになってしまう。これは陸上自衛隊で装備している多用途ヘリコプターUH-1のロータ直径に等しい。

こんな大きなものは容認できないだろうか。ではクワッドそれぞれのロータの負担を大きくすることで全体の小型化を図ってみよう。それでも大方の人が想像している大きさとは違い相当に大きいと感じてしまうはずだ。

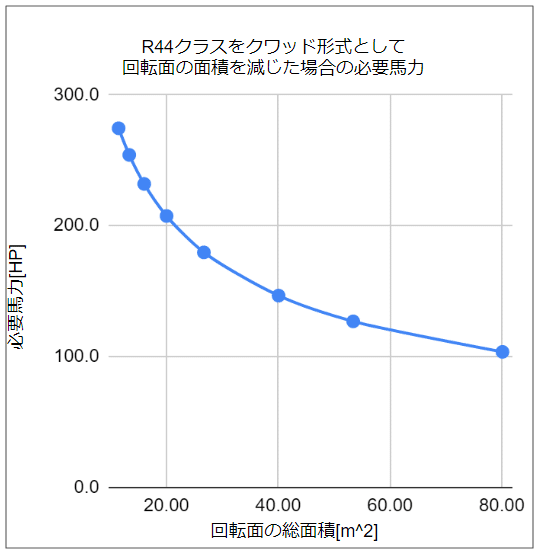
回転面積をさらに小さくすれば fig.09 のように大きなパワーを要してしまう。
4人乗りのR-44は海面上標準大気で100馬力ほど、これと同程度の大きさにした4人乗りのクワッド機(ロータ回転面の総面積はR44の半分)を想定した場合150馬力ほどのパワーがホバリングに必要なことが分かった。(fig.08参照)
ここまでヘリコプターのホバリングに必要なパワーの計算は、運動量理論によりエネルギー損失のない理想状態で考えた。だが実際にはエネルギーロスが存在する。これをヘリコプター効率(Figure of Merit)と云い次式で表す。

実用ヘリコプターのヘリコプター効率はどれくらいあるのだろうか。いま手元にBK117のB-2タイプの性能チャートがあるのでこれで逆算(計算過程は省略する)してみた。

上の左側のグラフは5分間定格の最大出力TOPでホバリングできる飛行重量を、右のグラフは連続最大出力MCP(時間制限なし)でホバリングできる飛行重量を、任意の大気条件でそれぞれ表している。
その値を例えば外気温度+20℃でピックアップしヘリコプター効率(下表ではホバリング効率)として整理した。なお下表の青字は機体構造限界からの制限でありエンジンの性能限界から算定されたものではない。

ここで実用ヘリコプターの効率は50数パーセントであることが分かる。だから少なくともエンジンの能力はその逆数を掛けたパワーが必要なのである。
余剰とは! 余剰があってこそ自由に飛べる
R-44で4人搭乗したとき運動量理論条件では103.7馬力(fig.08参照)必要だったが、現実の機体には245馬力のエンジンが搭載されている。ヘリコプター効率を55%として実際には188.5馬力の供給が必要なのだ。さらにこの場合、245-188.5=56.5 [馬力]の余剰があると云う。
1馬力は75[kg・m/sec] だから 56.5[馬力]= 4237.5 [kg・m/sec] である。この余剰パワーを飛行重量1066[kg]で除せば、3.98[m/sec]であり換算すれば783[fpm]となる。この余剰馬力を使用すれば、この機体は毎秒あたり約4mでホバリング上昇する性能を持っていると云うことだ。なおfpmは毎分あたりのフィートのことで、パイロットが飛行中に参照する昇降計の表示単位である。この値が500以上あれば安心して飛行できるが、この値を切れば心臓をバクバクさせながら操縦することになる。バクバクしない人は知らぬが仏で、危機に対応できずお陀仏になる。
実用ヘリコプターでもヘリコプター効率は50数%だった。fig.08で見たようにクワッド機のロータ半径は、小型実用R-44ヘリコプターの35%ほどであり翼端損失の割合が大きくなり、ヘリコプター効率は50%いくだろうか。R-44ではヘリコプター効率55%の逆数を掛けてホバリングに188.5馬力のエンジン側からの供給が必要だった。これと同等のクワッド機ではヘリコプター効率50%として207馬力を必要とする。
余剰馬力とPS
航空機の性能などを考えるのに便利なので技術者は様々な数値を無次元化する。だがヘリコプターの運用者としてはfpmほどの次元で表現してもらえると大変分かりやすい。小型機で余剰が50馬力ある、あるいは大型機で500馬力あると云われても、それでとなるが、次元を整理して余剰が500[fpm]あると表現してもらえれば、たちどころに意味が理解できる数値となる。これをPS(Specific ExcessPower)と云う。そしてPS値が同じなら小型大型を問わずパイロットは操縦の難易度に関して同じ点数をつける。
陸上自衛隊でヘリコプターのホバリング性能チャートといえば、このPSチャートであり各機種の飛行規定に収録され使用されている。民間ヘリコプターのホバリング性能チャートはFig.10で示したような形式であり限界が分かるだけで、そのとき限界までどの程度の余裕があるのかは明確ではない。fig.10から読み取ったfig.11のTOPホバリング重量もPSが0の状態であり、操縦するにもエネルギーが必要であり、実際にはホバリングできないのだ。
と云ってPSが0やマイナスの値であっても離陸できない訳ではない。飛行機は地上にあってPSは大きなマイナス値である。だが滑走させ速度を付けることにより、単位時間あたりに翼を通過する空気の量を増加させ重量に見合う揚力を獲得し離昇する。
ヘリコプターやドローンであっても同じだ。地上を走るなどしてロータ回転面を通過する空気を増やしてやれば、マイナスのPS値はやがて0を超えてプラスに転じ離陸できるのだ。そこをオリンポス社の四戸社長は次のように解説された。

マルチロータ機の現実の姿
上に示すように垂直離着陸が宿命、否、それが開発目的であったヘリコプターは離着陸性能以外の飛行性能については、それ故のハンディを始めから内在しているのだ。アルバトロスとツバメを比較するようなものだ。その上で四戸さんは現在のクワッド・マルチコプター機の開発状況について述べている。

半世紀以上も前に米軍がジープを空に上げようとの「空飛ぶジープ」構想などで開発が試みられた。
下のリンクは空飛ぶプラットホーム。
https://www.jiji.com/jc/d4?p=vtl207-45904492165821132&d=d4_mili
そして次は空飛ぶジープの動画。いずれも外部リンクだ。
軍だけでなくNASAや日本の航技研(NAL)でも開発が試みられたが頓挫または研究終了している。当たり前だが軍の開発要求はヘリコプターによって効果的に達成されることが改めて自明になった。以降ヘリコプターは軍民問わず大量に開発され生産され社会に浸透した。
その半世紀後、現代のドローンやマルチコプターの新たな開発ブームは、以前のものとは無縁であり、高性能のモーターやバッテリーが開発され、またデジタル制御が身近になったことなどによるもので、空力や構造的配慮がないままの粗製乱造状態にあると四戸さんは警鐘を鳴らす。
そしてロータをただのアクチュエータ(エネルギー変換器)としてしか見ていない。だから非効率に電力を大量消費し、安易に有人機にチャレンジし二乗三乗則に突き当たる例が多いとされる。二乗三乗則とは寸法を2倍にしたら面積は4倍になり体積重量は8倍になってしまうという事で、恐ろしくも当たり前の法則だ。
それがどれほど恐ろしいことかと云えば、寸法を2倍にして重量が8倍になったのに、翼面積あるいはロータ回転面積は4倍にしかなっていない。これは翼面荷重がスケールアップする前の2倍になったと云うことである。スケールアップ前の機体の飛びっぷりが良くてもスケールアップ後の飛びっぷりは劣悪だろう。
マルチロータ機の棲息域は在来ヘリコプターを超えられない
そこで四戸さんはマルチロータ機のボーダーラインを次のように結論した。

Payload(搭載重量)30数kgのヤマハRMAXは、全備重量105kgほどの完全なシングルロータ形式の無人ヘリコプターだ。それは二乗三乗則を逆手にとったもので風格がある。
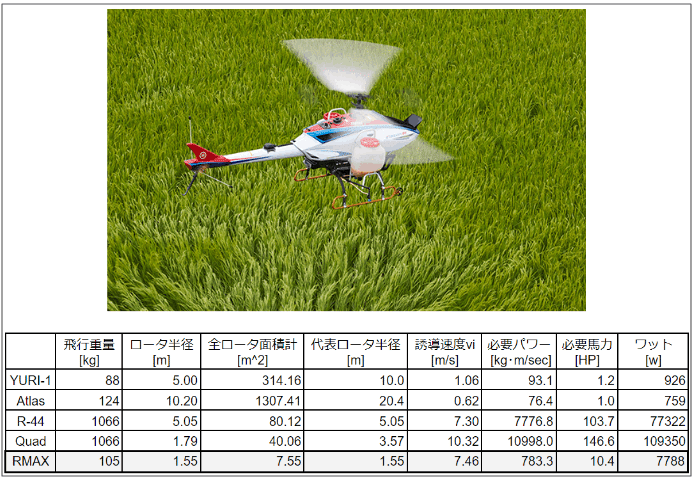
fig.15 のRMAXホバリングの写真を見てほしい。稲穂がメインロータ吹き下し(ダウンウオッシュ)を受けてこうべを垂れている。本稿前編でホバリングを運動量理論で説明したとき、「ロータを通過した空気は、その直後に誘導速度 vi (吹き下し、downwash)をもち、それがさらに十分後方においては(回転面を通過した空気が単位時間になした、仕事量と運動エネルギーの増加は等しいことから)2×vi の流速をもつ」と述べた。従って稲穂のあたりは毎秒12mのダウンウオッシュに見舞われていると云うことだ。
小型実用ヘリコプターR-44と同レベルの有人クワッド機では毎秒20mを超える風が通り抜ける。その影響はFig.16のとおりだ。この風は狭い範囲なのだが、前回影響がなかったとしても次回それが真上を飛ばないとの保証がないかぎり、警戒は必要であり可能性がある範囲で、それが吹き抜けたときのことを考慮して、離着陸場は設定されるべきだろう。
風ばかりでなく電動であってもそれなりの爆音がある。その音はドローンと云う単語の元にもなっているのであろう。しっかりとその定量値を教えてもらいたいものだ。
マルチコプターなどの有人ドローン機は、なにか新しい原理で飛んでいるわけではない。どっぷりと作用反作用の法則で飛んでいる。今後都心においてもこれらのカテゴリー機用の離着陸場の設定を急ぐと、幕張メッセ「第1回次世代エアモビリティEXPO 2022」で聞いた。
ヘリコプターは20世紀初頭から試行錯誤と飛行実験がなされ、1936年にはヘリコプターとして遜色のない飛行に成功し、このときオートローテンション着陸にも成功している。
100年を超える歴史と実績のあるヘリコプターには許さないで、どうして空飛ぶクルマと冠されるものは、歴史も実績もないのに許されるのだろうか。

RMAXをもう少し見ておきたい。運動量理論ではホバリングに10.4馬力を要した。ヘリコプター効率を55%とすれば、エンジンからの供給は18.988馬力が必要だ。
同機搭載エンジンは4Cycleのレギュラーガソリンの2気筒水平対向エンジンで排気量は390ccだ。スバル360など昔の軽自動車の排気量は360ccだったから、年配の方はイメージしやすいと思う。RMAXエンジンの最大出力は20.6kw = 27.625馬力だ。
以上からRMAX機のPS値は、
PS=(27.625-18.988)×75÷105=6.17[m/s]=1214[fpm]
過不足なく安心して「搭乗」できると思ったが無人機だった。この機体はきびきびと仕事をこなしている実績を裏付けるものだ。
四戸さんの説明資料 fig.14 のここでの結論は「垂直離着陸性能や搭載能力でマルチロータ機が在来型の無人ヘリコプターに勝てることはない」と云うことだろう。せいぜいペイロード(搭載重量)10kg未満で、かつ局地飛行の範囲において、在来型機より操用性が卓越しておれば、マルチロータ機が選択されるのだろう。だからマルチロータ機の有人化は考えられないと云うことなのだ。
そしてもう一つ垂直離着陸性能を同一にすれば、マルチロータ機より在来ヘリコプターの形の方が常に小型に収まるし、ダウンウオッシュも弱い。
無人/有人ドローン機の未来への提言
じっくり下の fig.17 を読んでほしい。そして幕張メッセ「第1回次世代エアモビリティEXPO 2022」の最終日最終セッションで、よくぞ語って下さったと思うのだ。

仕事をするドローンをマルチロータ機として、その程度はともかく、いずれ高速化が求められる。機体が前進速度をもつとき飛行方向側に前進回転するローターブレードと、その反対側に後退回転するローターブレードでは、下図のように相対風の速度が違ってくる。

そのままでは飛行速度が増すにつれ、前進側ブレードの推力(揚力)はどんどん増加し、後退側ブレードはどんどん減少することになる。このため前進象限にあるブレードは相対空気流に対する迎え角(α)を減少させ、また後退象限にあるブレードはそれを増加させて対処している。
この迎え角を周期的に変更させる工夫を下のfig.19で示した。

操縦桿の動きに応じスワシュプレートが傾く。傾いたスワシュプレートはリンクロッドを介して各ロータブレードの取付角(ピッチ)をロータの回転に応じ周期的に変更させる。これをサイクリック・コントロールと云う。ヘリコプターの姿勢操縦はこれを使い、前進飛行はロータ面を前傾させ、風が後方に流れる反作用で行っている。
またスワシュプレート全体を上下することにより、全ロータブレードのピッチ角を同時に増減できる。これはパイロットの左下にあるコレクティブ・ピッチコントロールレバーの上下によって行われる。もちろんそれによって負荷が大きく変動するので、それに応じたエンジンの出力コントロールも適切に行われなくてはならない。ヘリコプターのロータ回転数は一定に制御される。
マルチロータ機のマルチの各ロータにこのようなシステムはなじまない。無理に取り入れたら重くなる。マルチ機のロータブレードのピッチは固定であり、回転数を制御して各ロータの推力を制御している。四戸さんが「ロータをただのアクチュエータ(エネルギー変換器)としてしか見ていない」としたのはこう云うことで、前進飛行中の効率が悪く、本稿で詳しく解説したように、マルチロータ機のロータ直径の小型化は、これも効率を悪くさせる。「マルチロータ機が(在来ヘリコプター)に代わる余地はない」(fig.17)のだ。
つまりマルチロータ機の出る幕はなく、垂直離着陸VTOL機として究極の形態であるヘリコプターを何故使わないのかと訴え、その上でヘリコプターを超えたければ「Tilt-winng(Tilt-rotor)が唯一の解答」と云われるのだ。氏の想いに完全に同意するし、よくぞ発言して下さったと思っている。
現場エンジニアの何人かと話をする機会があった。問い詰めるとマルチロータ機などが空飛ぶクルマとして成立しないことは理解されている。だがこの方向でないと予算がおりないとも。そんな方向に莫大な予算をつぎ込んでいる、その意思決定のプロセス、どなたか検証してください。
意味のあることへの税金投入は将来への投資だが、全うな技術的背景のない構想や事業に対する税金投入は未来の凍死だろう。
四戸さんは小型機の設計を例に想いを語る。下の文中( )内は本稿筆者による追記補足だ。
複雑な構造設計の意図を直ぐに理解できることが、「二層目」の設計者になれる絶対条件で百人に一人もいない。
こんな(複雑な構造設計に関する)思考が大脳のバックグランドで瞬時に巡り、無意識の内に各種条件のトレードオフを繰り返しながらスケッチを描く「一層目」の人は万人に一人だ。
芸術分野では天賦の才は認められ易いが、(認められ難い)設計(分野でも天賦の才が必要なのは)同じだ。世間から(は、)大企業の設計室でCADに向かって図面を描いている人達は如何にも設計者に見えるが、彼等は「二層目」以下の技術者に過ぎない。彼等の仕事は「最上層」の技術者の構想あって初めて発生する。一般人が「最上層」を覗くことは不可能だ。
「最上層」の技術者は大企業にも数人居るかいないかだろう。
彼等と競うのはナンセンスだ。大学を出たからモーツァルトになれると思うだろうか。(その天才モーツァルトのような天才技術者)彼等が居るから大多数の「あなた」は食えるのだ。
近年、その能力ピラミッドを熟知すべき経営者自身が凡人に成り下がった。安易に(彼には理解できない)「最上層」をカットして滅ぶのだ。
そんな企業が日本国の姿と重なって見えてしまう。ああ
お口直しに四戸さんの「ZTOL」提案。
「Tilt-winng(Tilt-rotor)」時代になるまでのつなぎはこれで!
