
SPC2020に出場してきました

SPC2020に出場してきました
こんにちは。リーマンサット・プロジェクト ローバーチームZIPANGU PMの鶴見です。
9/19に北海道にある植松電機さん主催のスペースプローブコンテストに出場してきました!
今回はドローンから投下されるローバーに搭載されたスマホに入ったスマートフォンでARマーカを認識し、ターゲットに接近するミッションを行う予定です。
カメラを搭載していたので姿勢を安定させるために前輪と後輪を展開するギミックも搭載しました。

今回は北海道と各チームをつないで完全リモート開催となりました。
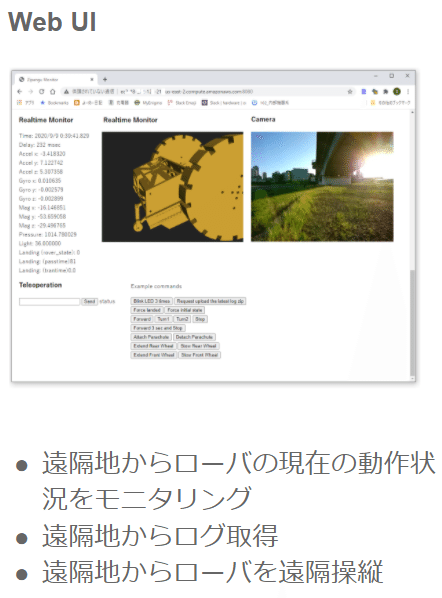
演算はスマートフォンで行うので、SIMカードを差せばAWSを経由して東京にいる我々にログデータなどがダウンリンクできる!
昨年と比較してメカ・エレキ・ソフトと少しずつ進歩をした技術を機体に詰め込み臨みました。
詳しくはこちらの事前発表スライドをご参照ください。
結果は…!
機体は風で大きく流されなんとターゲットから58メートルもの遠くへ。
そして、展開機構を設けた前輪が着陸時に破損…
走行不能となってしまいました。

しかしマイコン類は生きていたため、植松電機の社員の方に機体を手で運んでもらい、ARマーカに近づけてもらいました。

ハードウェアの故障により走行はかなわずでしたが、ARマーカの認識とモータに指令値を送ることには成功しました!
同じく詳細のログデータ等はこちらのスライドをご覧ください。
優秀賞獲得!
審査の結果は、過程の開発などを評価され、今年も無事優秀賞と賞金3万円を獲得いたしました!
しかし、特にハードウェア技術的には悔いが残る要素も多く、きちんと着陸し、走行できるというところまで至れなかったのは悔しい思いがあります。
来年の大会やマイルストーンも果たしてどうなるかわかりませんが、剛性の高い構造やきちんとした駆動系技術の開発も含め今後も技術を開発していきたいと考えています。
植松電機さんの大会結果詳細はこちらです!投下時の動画や得点内訳も記載されており、他チームの様子も見られるのでぜひご覧ください。
手始めに…!
大会を終え、ひと段落したのち手始めにエンコーダつきブラシレスモータのテスト機の製作を始めました。
ブレッドボードに載せただけのテストベッドですが、DCモータよりも精緻な制御ができるのに加え、オドメトリやカメラなどのセンサデータを合わせて軌跡の再現なども今後は技術開発していきたいと考えています。
メカの方は、まずはドローンから投下しても破壊しない安全な構造に立ち返り、ドライブシャフトに応力のかからない構造を概念検討しています。


いざ、伊豆大島!
そして、11月末に伊豆大島へと遠征を計画しています!(実験の下見を口実に旅行したいだけ)
伊豆大島の裏砂漠という場所はなんとなく火星とか系外惑星を彷彿とさせるフィールド…!
Astroboticsのユーザーズガイドを読んでみよう
そして、そろそろ本格的に月面を目指すフェーズなのかもとも思い始めたので技術コアメンバーを中心にとりあえずは月面輸送サービスの提供を計画している(初打ち上げは2021年?)Astrobotics社のユーザーズガイドを読んでみる会を発足しました。
今後もゆるりと月面を目指す…!
こんな感じで大会を終えゆるりと過ごしているZIPANGUですが、少しずつ一歩一歩進んでいます!
引き続き寄付やメンバーとして協力したい方がいたら、リーマンサット・プロジェクトのHPからぜひよろしくお願いします!
https://www.rymansat.com/
いいなと思ったら応援しよう!
