[断面画像を重ね合わせて、物体を3次元表示], Python(パイソン) 使って作ってみた ,ソースプログラムリスト あり

Python(パイソン) プログラム作ってみた インデックス へ
-----
2024.8.23 presented in [note] ( //note.com/runningWater/ )
2024.9.14 プログラム改変に伴う、書き直しを行った
----------
1 はじめに
これ以降に記述されている内容は、このようなコンピューター・プログラムを制作した、というような事を、ただ、述べているに過ぎない。
以下の記述を読んだ人が、それを単に参考にする、というのであれば、問題は無いと、思われる。
しかし、記述されている内容に沿って、その人が、そこに記されているのと同様の制作や作業を行った際に、その制作、作業、コンピューターの作動の結果、使用されたコンピューター等、様々な方面において、何らかの問題が発生しない、という保証は、全くない。
その制作、作業、コンピューターの作動の結果、その人や、その人が所属している組織、その人が使用した様々な機器、インフラストラクチャー等の、身の上にどのような事が起ころうとも、私は一切、責任を負わない。
このプログラムは、Python(パイソン) 言語を使って、記述されている。
----------
2 どのようなものを作ったのか
ある物体を、様々な高さで輪切りにして、その断面を撮影した、というような画像の集合が、あるとして、
それらを読み込み、合成し(高さの順に重ね合わせして)、その物体を、3次元表示する
と、いうようなプログラムを、作ってみた。
その動作の例を以降に記す。
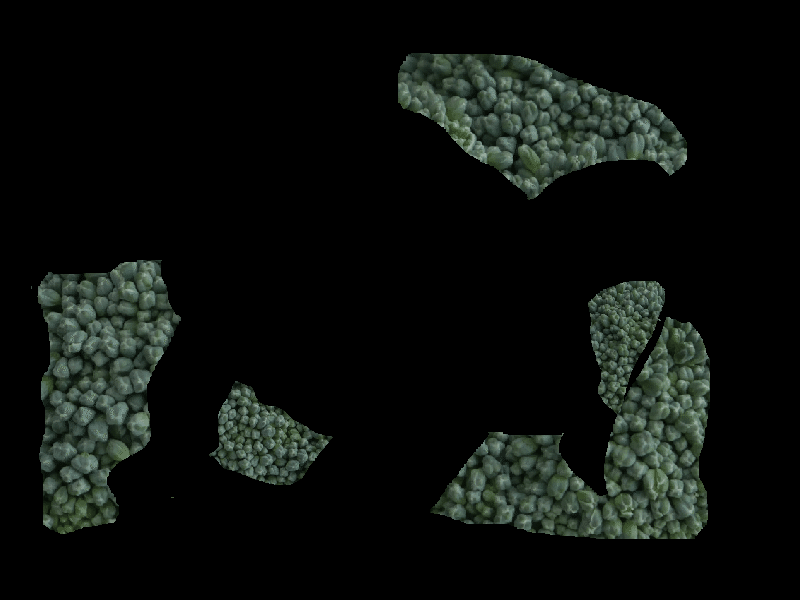
[ある物体を、様々な高さで輪切りにして、その断面を撮影した、というような画像の集合]
として、50個の画像を作成し、それを、[テスト用画像集合] と、した。その一部を、下記に示す。
DrawingImageData_01.png
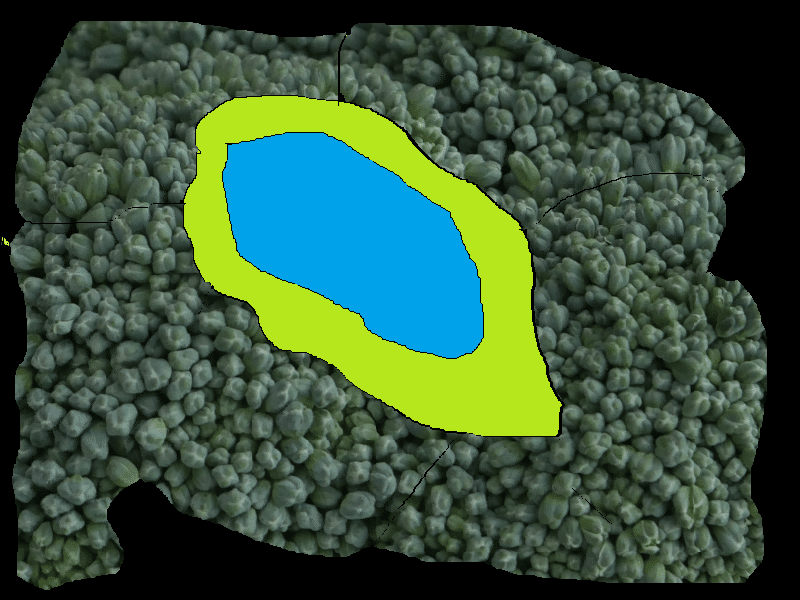
DrawingImageData_25.png

DrawingImageData_37.png
起動処理・サブグループ(後述)を、起動し
表示されるウィンドウに対して
[degree_XAxis_to_YAxis] , [degree_XAxis_to_ZAxis] に、それぞれの回転角度を入力し
[Set Angle] ボタンをクリックし
[Display Image] ボタンをクリックしたら、
下記のような表示状態となった。
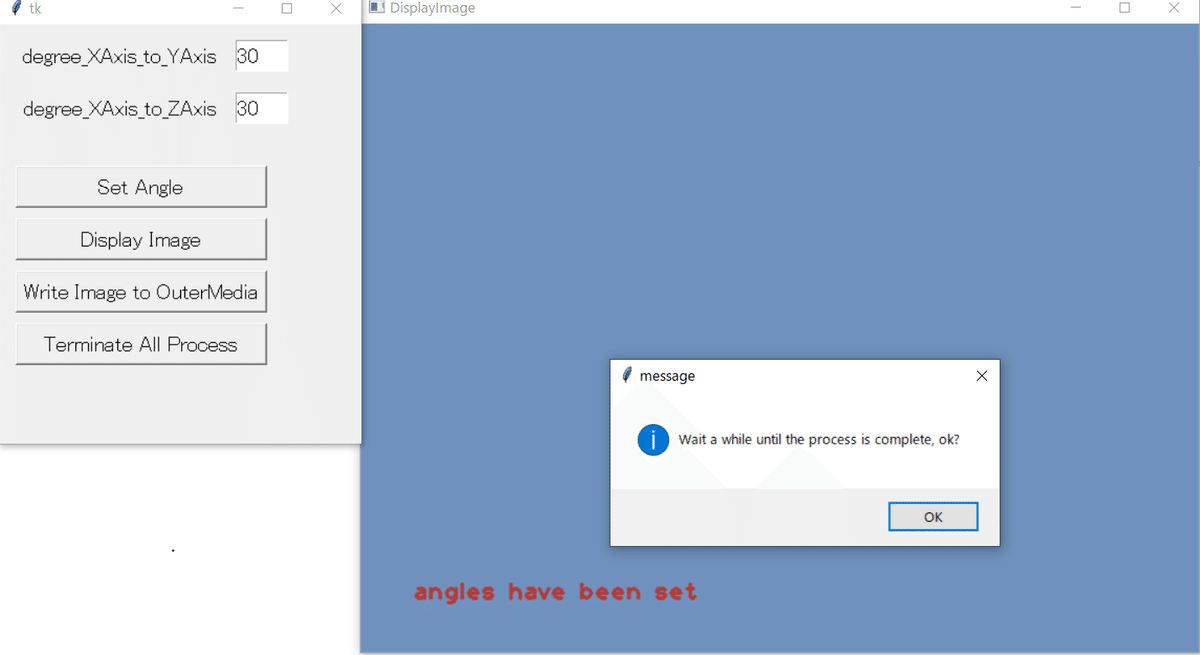
[OK] ボタンをクリックしたら、3次元表示イメージを作成する処理が始まった。その後、下図に示したようなものが、画面上に表示された。
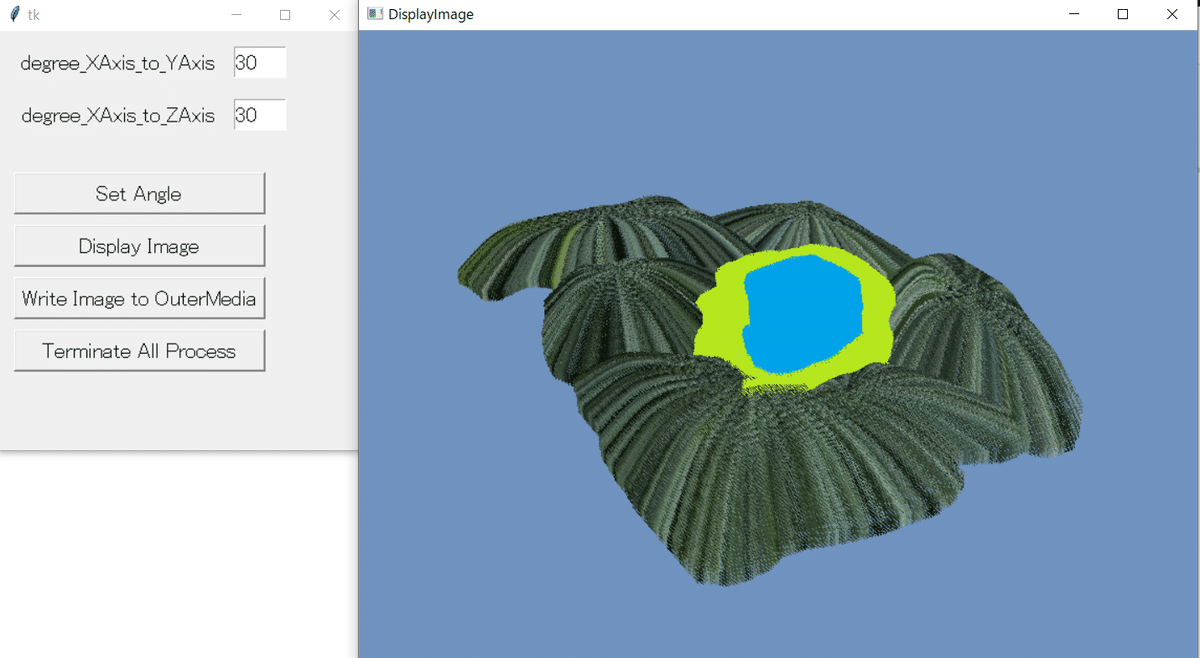
上図の右側に表示されているのが、[テスト用画像集合]を重ね合わせして作られた、3次元表示である。([山々に囲まれた中にある、湖]のようなイメージ)。
[Z = n の平面] (Z軸に対して、垂直)に、[画像データ DrawingImageData_n.png] の、黒色でない部分が投影される、というような方式に、した。
[degree_XAxis_to_YAxis] , [degree_XAxis_to_ZAxis] に、指定する角度を変えると、それに対応して、表示が変化するように、してある。
----------
3 このモジュール群の構成
以下のような、サブグループから、構成されている。
起動処理・サブグループ
パラメーター値・保持用・サブグループ
仲介役・サブグループ
データ入力用・サブグループ
表示用・サブグループ
バックヤード処理・サブグループ
これらに属するモジュールは、必要に応じて、下記に解説されているモジュールを、使用している。
Python(パイソン) ,ソースプログラムリスト あり ,プログラム作ってみた ,[エラー処理] を 行う
Python(パイソン) ,OpenCV2 ,ソースプログラムリスト あり ,プログラム作ってみた ,[画像処理, OpenCV2 使用] を 行う
Python(パイソン) ,ソースプログラムリスト あり ,プログラム作ってみた ,[XML データ を、読み込み、そこに記述されている内容を、利用可能な形にする] を 行う
[3次元の回転 回転後の位置座標算出]のためのクラスは、後述のようなものを使用した。( [MatrixFor3DRotaionV2] )
これらのサブグループについて、順次、以降に述べる。
----------
4 起動処理・サブグループ
このサブグループは、下記に示すような、1個のモジュールより、構成される。このモジュールを起動することにより、モジュール群全体が、起動されることと、なる。
下記に、その内容を記した。
ファイル名 [StartProcess.py]
-----
import ParametersContainer
import DataInputFormV2
import Mediator
#------------------------------
def func_start_process ( ) :
MODULE_NAME = "StartProcess"
function_name = "func_start_process"
print ( "==================================" )
print ( "Enter into , Module = " + MODULE_NAME
+ " , function = " + function_name )
print ( "==================================" )
# get Parameters
ParametersContainer \
.initialize ( )
ParametersContainer \
.display_parameter_value ( )
Mediator \
.initializing_process ( )
# display form for input
DataInputFormV2 \
.display_form_for_intput ( )
return
#-----------------------------
def main ( ) :
func_start_process ( )
if __name__ == '__main__':
main()
-----
----------
5 パラメーター値・保持用・サブグループ
下記に、その内容を記した。
[断面画像を重ね合わせて、物体を3次元表示]の , [パラメーター値・保持用・サブグループ] へ
----------
6 仲介役・サブグループ
下記に、その内容を記した。
[断面画像を重ね合わせて、物体を3次元表示]の , [仲介役・サブグループ] へ
----------
7 データ入力用・サブグループ
下記に、その内容を記した。
[断面画像を重ね合わせて、物体を3次元表示]の , [データ入力用・サブグループ] へ
----------
8 表示用・サブグループ
下記に、その内容を記した。
[断面画像を重ね合わせて、物体を3次元表示]の , [表示用・サブグループ] へ
----------
9 バックヤード処理・サブグループ
下記に、その内容を記した。
[断面画像を重ね合わせて、物体を3次元表示]の , [バックヤード処理・サブグループ] へ
----------
10 3次元の回転 回転後の位置座標算出
下記に、その内容を記した。
ファイル名 [ MatrixFor3DRotaionV2.py ]
----------
import numpy as NUMPY
import math
#===========================================
class MatrixFor3DRotaionV2 :
CV_CLASS_NAME = "MatrixFor3DRotaionV2"
#------------------------------------------------------------
# definition of constructer
def __init__( self
, arg_requester_module
, arg_requester_function
#when doing first rotation, around, what axis?
, arg_first_rotation_around_axis
#when doing first rotation, how dgree, used?
, arg_first_rotation_angle_degree
, arg_need_Y_N_second_rotation
#when doing second rotation, around, what axis?
, arg_second_rotation_around_axis
#when doing second rotation, how dgree, used?
, arg_second_rotation_angle_degree
) :
methode_name = "constructer"
# print ( "==================================" )
# print ( "Enter into , Class = " + MatrixFor3DRotaion.CV_CLASS_NAME
# + " , methode = " + methode_name )
# print ( " arg_requester_module = " + arg_requester_module
# + " , arg_requester_function = " + arg_requester_function )
# print ( "==================================" )
self.iv_first_rotation_around_axis = arg_first_rotation_around_axis
self.iv_first_rotation_angle_degree = \
arg_first_rotation_angle_degree
self.iv_first_rotation_angle_radian \
= self.iv_first_rotation_angle_degree \
* ( math.pi / 180.0 )
self.iv_ins_MatrixUsingNUMPY_for_first_rotation \
= self.make_matrix ( \
self.iv_first_rotation_around_axis
, self.iv_first_rotation_angle_radian
)
self.iv_need_Y_N_second_rotation = arg_need_Y_N_second_rotation
if ( self.iv_need_Y_N_second_rotation != "Y" ) :
self.iv_ins_MatrixUsingNUMPY_for_rotation \
= self.iv_ins_MatrixUsingNUMPY_for_first_rotation
self.iv_second_rotation_around_axis = " "
self.iv_second_rotation_angle_degree = 0
self.iv_second_rotation_angle_radian = 0
# ******************************************
# print ( "self.iv_need_Y_N_second_rotation = " \
# , self.iv_need_Y_N_second_rotation )
# ******************************************
# print ( "self.iv_ins_MatrixUsingNUMPY_for_first_rotation = " )
# print ( self.iv_ins_MatrixUsingNUMPY_for_first_rotation )
# print ( "self.iv_ins_MatrixUsingNUMPY_for_rotation = " )
# print ( self.iv_ins_MatrixUsingNUMPY_for_rotation )
# print ( "==================================" )
# print ( "Exit from , Class = " + MatrixFor3DRotaion.CV_CLASS_NAME
# + " , methode = " + methode_name )
# print ( " arg_requester_module = " + arg_requester_module
# + " , arg_requester_function = " + arg_requester_function )
# print ( "==================================" )
return
else : # need_Y_N_second_rotation
self.iv_second_rotation_around_axis = \
arg_second_rotation_around_axis
self.iv_second_rotation_angle_degree = \
arg_second_rotation_angle_degree
self.iv_second_rotation_angle_radian \
= self.iv_second_rotation_angle_degree \
* ( math.pi / 180.0 )
self.iv_ins_MatrixUsingNUMPY_for_second_rotation \
= self.make_matrix ( \
self.iv_second_rotation_around_axis
, self.iv_second_rotation_angle_radian
)
# make matrix of multiplaying first and second rotation
self.iv_ins_MatrixUsingNUMPY_for_rotation \
= NUMPY.matmul ( \
self.iv_ins_MatrixUsingNUMPY_for_second_rotation
, self.iv_ins_MatrixUsingNUMPY_for_first_rotation
)
# print ( "self.iv_need_Y_N_second_rotation = " \
# + self.iv_need_Y_N_second_rotation )
# print ( "self.iv_ins_MatrixUsingNUMPY_for_second_rotation = " )
# print ( self.iv_ins_MatrixUsingNUMPY_for_second_rotation )
# print ( "self.iv_ins_MatrixUsingNUMPY_for_first_rotation = " )
# print ( self.iv_ins_MatrixUsingNUMPY_for_first_rotation )
# print ( "self.iv_ins_MatrixUsingNUMPY_for_rotation = " )
# print ( self.iv_ins_MatrixUsingNUMPY_for_rotation )
# print ( "==================================" )
# print ( "Exit from , Class = " + MatrixFor3DRotaion.CV_CLASS_NAME
# + " , methode = " + methode_name )
# print ( " arg_requester_module = " + arg_requester_module
# + " , arg_requester_function = " + arg_requester_function )
# print ( "==================================" )
return
# ---------------------------------------
# print ( "==================================" )
# print ( "Exit from , Class = " + MatrixFor3DRotaion.CV_CLASS_NAME
# + " , methode = " + methode_name )
# print ( " arg_requester_module = " + arg_requester_module
# + " , arg_requester_function = " + arg_requester_function )
# print ( "==================================" )
#------------------------------------------------------------
def calculate_cordinate_after_rotation ( self \
, arg_list_cordinate_before_rotation
) :
methode_name = "calculate_cordinate_after_rotation"
# print ( "==================================" )
# print ( "Enter into , Class = " + MatrixFor3DRotaion.CV_CLASS_NAME
# + " , methode = " + methode_name )
# print ( " arg_list_cordinate_before_rotation = " )
# print ( arg_list_cordinate_before_rotation )
# print ( "==================================" )
cordinate_before_NUMPY = \
NUMPY.array ( \
[ \
[ arg_list_cordinate_before_rotation [ 0 ] ] \
, [ arg_list_cordinate_before_rotation [ 1 ] ] \
, [ arg_list_cordinate_before_rotation [ 2 ] ] \
] \
)
return_matrixUsingNUMPY = NUMPY.matmul ( \
self.iv_ins_MatrixUsingNUMPY_for_rotation
,cordinate_before_NUMPY
)
# print ( "==================================" )
# print ( "Class = " + MatrixFor3DRotaion.CV_CLASS_NAME
# + " , methode = " + methode_name )
# print ( "==================================" )
# print ( "cordinate_before_NUMPY = " )
# print ( cordinate_before_NUMPY )
# print ( "self.iv_ins_MatrixUsingNUMPY_for_rotation = " )
# print ( self.iv_ins_MatrixUsingNUMPY_for_rotation )
# print ( "return_matrixUsingNUMPY = " )
# print ( return_matrixUsingNUMPY )
# print ( "************************" )
# print ( "matmul done" )
# print ( "************************" )
#*********************************
return_list = [ \
float ( return_matrixUsingNUMPY [ 0 ] [ 0 ] ) \
, float ( return_matrixUsingNUMPY [ 1 ] [ 0 ] ) \
, float ( return_matrixUsingNUMPY [ 2 ] [ 0 ] ) \
]
# return return_matrixUsingNUMPY
return return_list
#*********************************
#------------------------------------------------------------
def make_matrix ( self \
, arg_rotation_around_axis
, arg_rotation_angle_radian
) :
methode_name = "make_matrix"
rotation_matrix_value = [
[ 1 , 0 , 0 ] ,
[ 0 , 1 , 0 ] ,
[ 0 , 0 , 1 ]
]
if ( arg_rotation_around_axis == "Z" ) :
#rotation around Z axis
# direction X axis --> Y axis
#--------- row 1 ---------------
rotation_matrix_value [ 1 - 1 ] [ 1 - 1 ] \
= math.cos ( arg_rotation_angle_radian )
rotation_matrix_value [ 1 - 1 ] [ 2 - 1 ] \
= ( 0.0 - math.sin ( arg_rotation_angle_radian ) )
rotation_matrix_value [ 1 - 1 ] [ 3 - 1 ] \
= 0.0
#---------- row 2 --------------
rotation_matrix_value [ 2 - 1 ] [ 1 - 1 ] \
= math.sin ( arg_rotation_angle_radian )
rotation_matrix_value [ 2 - 1 ] [ 2 - 1 ] \
= math.cos ( arg_rotation_angle_radian )
rotation_matrix_value [ 2 - 1 ] [ 3 - 1 ] \
= 0.0
#---------- row 3 --------------
rotation_matrix_value [ 3 - 1 ] [ 1 - 1 ] \
= 0.0
rotation_matrix_value [ 3 - 1 ] [ 2 - 1 ] \
= 0.0
rotation_matrix_value [ 3 - 1 ] [ 3 - 1 ] \
= 1.0
return_matrixUsingNUMPY \
= NUMPY.array ( rotation_matrix_value )
return return_matrixUsingNUMPY
#---------------------------------------------------
if ( arg_rotation_around_axis == "Y" ) :
#rotation around Y axis
# direction X axis --> Z axis
#--------- row 1 ---------------
rotation_matrix_value [ 1 - 1 ] [ 1 - 1 ] \
= math.cos ( arg_rotation_angle_radian )
rotation_matrix_value [ 1 - 1 ] [ 2 - 1 ] \
= 0.0
rotation_matrix_value [ 1 - 1 ] [ 3 - 1 ] \
= math.sin ( arg_rotation_angle_radian )
#---------- row 2 --------------
rotation_matrix_value [ 2 - 1 ] [ 1 - 1 ] \
= 0.0
rotation_matrix_value [ 2 - 1 ] [ 2 - 1 ] \
= 1.0
rotation_matrix_value [ 2 - 1 ] [ 3 - 1 ] \
= 0.0
#---------- row 3 --------------
rotation_matrix_value [ 3 - 1 ] [ 1 - 1 ] \
= 0.0 - math.sin ( arg_rotation_angle_radian )
rotation_matrix_value [ 3 - 1 ] [ 2 - 1 ] \
= 0.0
rotation_matrix_value [ 3 - 1 ] [ 3 - 1 ] \
= math.cos ( arg_rotation_angle_radian )
return_matrixUsingNUMPY \
= NUMPY.array ( rotation_matrix_value )
return return_matrixUsingNUMPY
#---------------------------------------------------
if ( arg_rotation_around_axis == "X" ) :
#rotation around X axis
# direction Y axis --> Z axis
#--------- row 1 ---------------
rotation_matrix_value [ 1 - 1 ] [ 1 - 1 ] \
= 1.0
rotation_matrix_value [ 1 - 1 ] [ 2 - 1 ] \
= 0.0
rotation_matrix_value [ 1 - 1 ] [ 3 - 1 ] \
= 0.0
#---------- row 2 --------------
rotation_matrix_value [ 2 - 1 ] [ 1 - 1 ] \
= 0.0
rotation_matrix_value [ 2 - 1 ] [ 2 - 1 ] \
= math.cos ( arg_rotation_angle_radian )
rotation_matrix_value [ 2 - 1 ] [ 3 - 1 ] \
= 0.0 - math.sin ( arg_rotation_angle_radian )
#---------- row 3 --------------
rotation_matrix_value [ 3 - 1 ] [ 1 - 1 ] \
= 0.0
rotation_matrix_value [ 3 - 1 ] [ 2 - 1 ] \
= math.sin ( arg_rotation_angle_radian )
rotation_matrix_value [ 3 - 1 ] [ 3 - 1 ] \
= math.cos ( arg_rotation_angle_radian )
return_matrixUsingNUMPY \
= NUMPY.array ( rotation_matrix_value )
return return_matrixUsingNUMPY
#-----------------------------------------
return_matrixUsingNUMPY \
= NUMPY.array ( rotation_matrix_value )
return return_matrixUsingNUMPY
----------
----------
Python(パイソン) プログラム作ってみた インデックス へ