
システム論の展開

システム論では膨大な数の手法が提案されており、とてもすべてを解説できないことから、本稿では、要求工学に関連する手法として、図1に示す手法を選んで説明する。
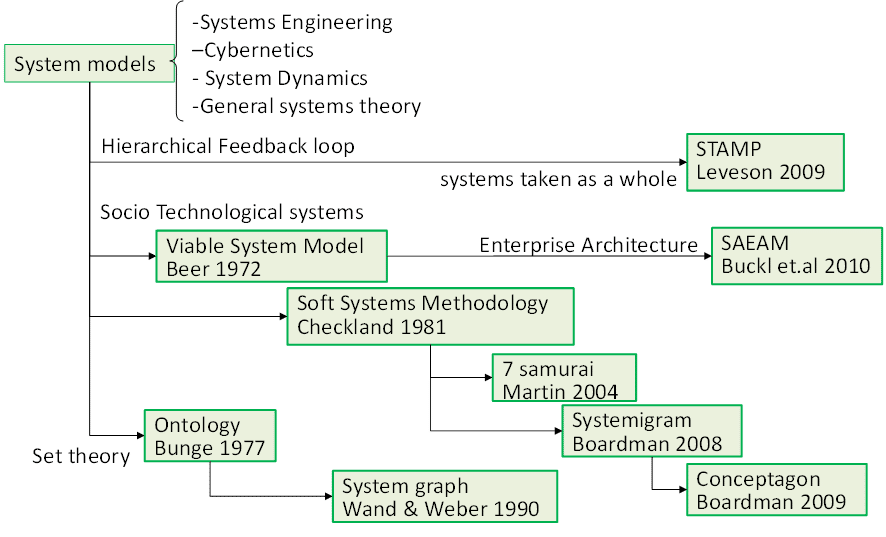
システム論は1950年代のシステム工学(Systems Engineering)[1]や通信工学と制御工学を融合したサイバネティクス(cybernetics)[2], Bertalanffyの一般システム理論(General Systems Theory)[3]、Forresterのシステムダイナミクス(System Dynamics)[4]などに始まる。
図1に示すように,システム論には多様な手法があるにもかかわらず,日本では,システムダイナミクス以外ほとんど知られていないのではないか?
今後、このブログでは,Soft System Methodology(SSM)、7人の侍フレームワーク、システミグラム、コンセプタゴン、オントロジーモデルなど、システム論に基づく各種のモデルについて解説する予定である。
参考文献
[1] Williams, T.J., Systems Engineering for the Process Industries, McGrawHill, New York, 1961.
[2] Norbert Wiener, Cybernetics: or Control and Communication in the Animal and the Machine, 池原止戈夫, 彌永昌吉, 室賀三郎訳『サイバネティックス: 動物と機械における制御と通信』岩波書店 (1957)
[3] Ludwig von Bertalanffy General System Theory: Foundations, Development, Applications New York: George Braziller, 1968
[4] Forrester, J. W. 1956. Dynamic Models of Economic Systems and Industrial Organizations. Note to the Faculty Research Seminar, MIT System Dynamics Group DMemo 0 (5 November). Reprinted as Forrester, J. W. 2003. System Dynamics Review 19(4) 331-345.