カメラモデルについてのメモ

ピンホールカメラ
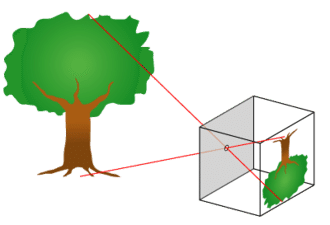
ピンホール(針穴のような小さな穴)をあけた箱の内側に外界の風景が上下左右反転して映ることを利用した写真機
[引用画像] https://ja.wikipedia.org/wiki/%E3%83%94%E3%83%B3%E3%83%9B%E3%83%BC%E3%83%AB%E3%82%AB%E3%83%A1%E3%83%A9
このピンホールカメラをモデル化したものがピンホールカメラモデル(pin-hole camera model)という。
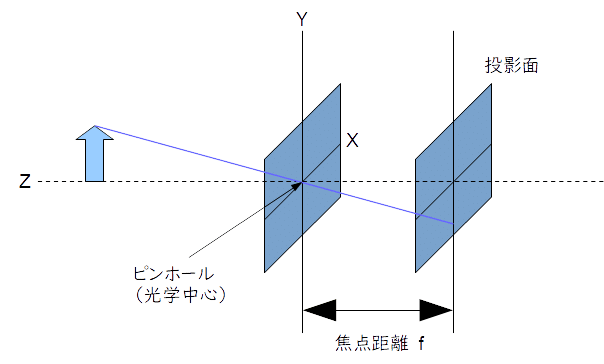
光学中心(optical center)(ピンホール位置)(ピンホール)を通る光線だけで投影面(plane of projection)への結像をモデル化している。
モデルパラメータは、ピンホールから投影面までの距離である焦点距離 f。
光学中心を通り投影面に垂直な直線を光軸(optical axis)、光軸と投影面との交点を画像中心(image center)という。

[引用画像] http://www.sanko-shoko.net/note.php?id=g3ft
[引用画像]
http://nekketsu-engineer.hatenablog.com/entry/2019/01/11/000925
物体と投影面上の画像の大きさの関係について考える。
光学中心を原点とする3次元空間の座標を (X,Y,Z), Z = -fの平面を投影面
投影面上の画像中心を原点とする画像座標を(x,y)とする
物体の高さYと投影面上にできる画像の大きさyとの関係は
Y : Z = y : f
したがって、画像の座標向きを考慮すると光学中心を原点とする三次元空間の座標(X,Y,Z)と画像座標(x,y)との関係は
x = -f * X/Z
y = -f * Y/Z
ディジタルカメラはレンズを使っている。しかし、被写体と投影面に結像する画像との幾何学的な関係は、ピンホールカメラモデルでモデル化することが多い。
ピンホールの代わりにレンズを使う利点は、より大きな面積を通過した光を投影面に集めることができるため、結像する画像が明るくなる(感度が高くなる)。一方、レンズを使うカメラではピント合わせが必要になるが、ピンホールカメラではピント合わせる必要がない。
(ピンホールカメラではすべての距離にピントが合う)
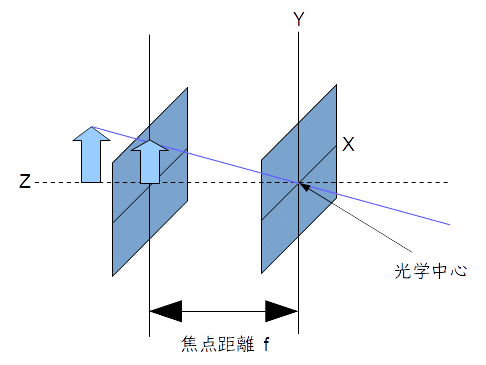
透視投影モデル
ピンホールカメラモデルでは対象の像が上下左右反対に投影される。
コンピュータービジョン分野では透視投影モデル(perspective projection model)を利用する。光学中心から透明な仮想投影面を通して3次元空間を見ることになる。このため、対象の向きと投影面における対象の像がの向きが一致する。
[引用画像]
http://nekketsu-engineer.hatenablog.com/entry/2019/01/11/000925
光学中心を原点とする3次元空間中の座標を(X,Y,Z) Z = fの平面を投影面、投影面上の画像中心を原点とする画像座標を(x,y)とすると、
x = f * X/Z
y = f * Y/Z
光学中心は、ピンホールカメラモデルではピンホール位置だったが、透視投影モデルではピンホール位置に相当する仮想的な中心を表す。
光学的な意味での甘楽の位置を表す点と考えることができる。
撮影カメラの位置と姿勢を表すためにしか四角錐を用いることがある。
レンズモデル
レンズを用いたカメラでは、ピンホールカメラよりも感度が高い代わりにピント合わせをする必要があり、ピンホールカメラと異なり光学中心の位置も分かりにくい。
撮影用レンズにおける光学中心の位置とレンズを用いることによって画像に生じる影響について考える。
薄肉レンズ
焦点距離 f と開口径(aperture)で特性が表現できるレンズを薄肉レンズ(thin lens)と呼ぶ。
両面が同じ球面の薄肉レンズでは、レンズの中心が光学中心であり、この点をレンズの主点(principal point)とよぶ。このとき光学上の無限遠位置にある点光源は、レンズ国宝で光軸上の焦点(focus)に結像する。レンズの主点と焦点までの距離を焦点距離(focal length)と呼ぶ
レンズの主点を通り光軸に垂直な平面を主平面(principal plane)とよぶ

[引用画像] https://slidesplayer.net/slide/17534948/
光線が主平面を通過するときに光線が曲げられる、という近似が成立する(薄い)レンズであり、特徴は次のとおり
・レンズ光軸に平行な光源がレンズを通過するとき焦点で光軸と交わる
・焦点で光軸と交わる光線がレンズを通過すると光軸で平行になる
・レンズの主点を通過する光線は直進する
点光源位置がレンズに近づくと、焦点とは異なる位置に結像する。
レンズ前方の a の距離にある物体が、レンズ後方 b の距離で結像するとき、レンズ焦点距離をfとすると、以下が成り立つ(ガウスのレンズの公式)
1/a + 1/b = 1/f
レンズ後方の焦点距離fの位置に撮像素子を配置すると、撮影物体が無限遠(とみなせるほど遠方)にあるときには、ピントの合った画像を撮影できる
しかし、近くの物体を撮影するときには、レンズを撮像素子から話す方向に移動しないとピントが合わない
厚肉レンズ
レンズによっては焦点距離に対してレンズの厚みを無視できないものがある。このようなレンズを厚肉レンズ(thick lens)とよぶ
前側主点(物体側主点)H と後側主点(像側主点) H' があり、それぞれの主点に対応して、前側焦点 F と後側焦点 F' がある。

[引用画像] https://slidesplayer.net/slide/17534948/
実際の写真用レンズは何枚かのレンズで構成されており、厚肉レンズと考えることができる。
このような写真用レンズを用いたカメラの光学中心位置は、前側主点Hとなる。主点を通る光線は直進するため、この点を中心にカメラを(ex : パン方向)回転しながら撮影すると、撮影範囲は変化するがカメラの位置は変化しない
ピント合わせやズームレンズでの焦点距離の変更は、レンズ主点位置が変化する可能性がある。レンズ主点位置はカメラ位置を表し、多くの画像処理や画像計測で重要な役割を持つ。
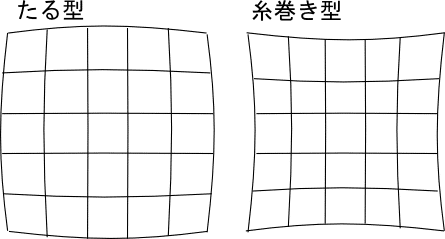
歪曲収差
レンズを使ったカメラではレンズの歪曲収差(distortion)をモデル化する場合がある。レンズの半径方向とそれに直交する接線方向の歪曲収差がある。
被写体から出た光線がある入射角でレンズ主点を通るとき、出射角が入射角と等しくならないため生じる。接線方向の歪曲収差はレンズを構成する複数のレンズ間の中心位置ズレや傾きによって発生する
[引用画像] https://optipedia.info/opt/optics/distortion/
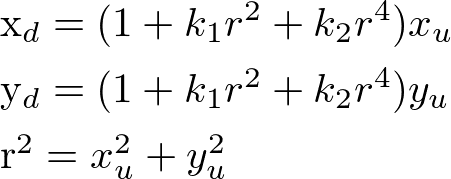
このモデルは理想的なレンズで撮影した画像からの歪曲を表している。すなわち、歪曲の無い画像から歪曲のある画像を作るためのモデルである。
実際にはレンズには歪曲収差があるため、歪曲のある画像しか入手できない。このような歪曲のある画像から歪曲を取り除くために変数を入れ替えたモデルもよく利用される。

3次元空間のある点を撮影して画像座標を得るとき、歪曲収差のない理想的なレンズでは(xu, yu), 歪曲収差のあるレンズでは(xd, yd)とする。rは、画像中心から(xu, yu)までの距離である。k1 ~ k5はレンズゆがみを表す係数。
このうちk3とk4が接線方向の歪曲収差をアr和須賀、実仕様上は無視できることも多いため、以下のような簡略化したモデルも多く用いられている。
撮影画角
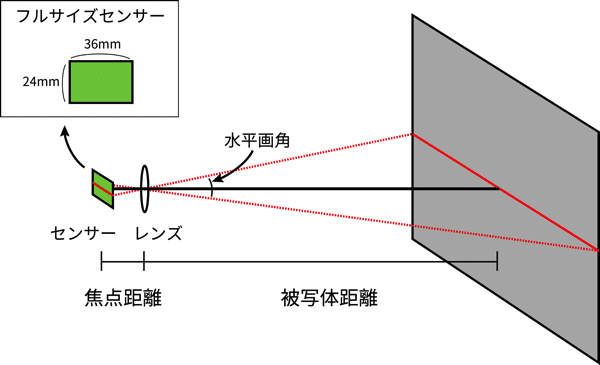
カメラとレンズを選定すると、撮像画角が決定する。
撮影レンズの焦点距離が同じなら、撮像素子サイズ(より正確には撮像素子のなかのイメージエリア)が大きいほど広い範囲を撮影できる。この撮影範囲を画角(angle of view)という
撮影用のレンズの画角は撮影レンズの後側主点と撮像素子サイズの対角線両端のなす角度(公称対角線画角)であらわすことが多い。
撮像素子の幅と高さに対応する画角をそれぞれ水平画角(horizontal angle of view)と垂直画角(vertical angle of view)という
撮像素子サイズが同じなら、撮影レンズの焦点距離が短いほど広い範囲を撮影できる。
[画像引用]
http://blog.eflens.net/2015/05/angle-from-focal-length/
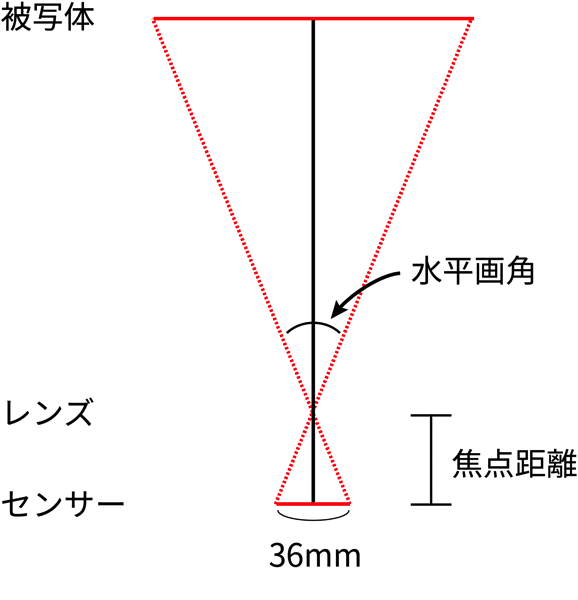
画角はθはレンズ焦点距離 f [mm]と撮像素子サイズ S [mm]から以下のように計算できる
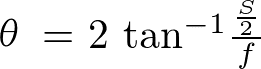
撮影素子サイズの横サイズを使えば、水平画角
縦サイズを使えば、垂直画角が得られる
レンズ焦点距離
レンズの後側主点から後側焦点までの距離である。
35mm(フィルム)換算焦点距離(35mm equivalent focal length)を使ってカメラに搭載された撮像素子サイズに対する撮影レンズの焦点距離を表すことがある。
35mmフィルム換算焦点距離 f35 は対角線撮像素子サイズSと実際のレンズ焦点距離 f により、計算できる

Reference
ピンホールカメラ - Wikipedia
カメラモデル (camera model)
Slide share ピンホールカメラモデル
ディジタル画像処理
ワールド座標系の基礎 1 - 熱血エンジニアのメモ用紙
デジタルメディア処理1 担当: 井尻 敬 TODO 次週の内容について簡単に触れる 表色系は時間があればやる(2017年は無理だった) - ppt download
これは直感的!焦点距離から画角を概算する方法を考えた! | Capture the MOMENT!