Madgwickフィルタで姿勢の演算を行う

環境
WIndows11
開発環境: VScode + PlatformIO + Docker
動作環境: WSL2(Ubuntu 22.04) + ROS2(Humble)
前回までのあらすじ
9軸センサLSM9DS1の値を読み取り、その値をROSのトピックに乗せて配信し、そのトピックを購読した結果、センサーの値がわたっていることが確認できた。
今回の話
Madgwickフィルタを使って、センサの値から現在の姿勢を演算し、トピック配信を試みる
Madgwickフィルタ
6軸あるいは9軸センサの値をもとにXYZ軸方向の傾きを計算するライブラリ
軽量でArduino系のマイコンでも動作する。
1. LSM9DS1 ライブラリを組み込む
ライブラリの詳細は以下のサイトへ
使い方をとりあえず簡単に・・・
1. ライブラリの組み込み

2.セットアップ関係



100Hzなので10ms間隔で演算を行うようにする
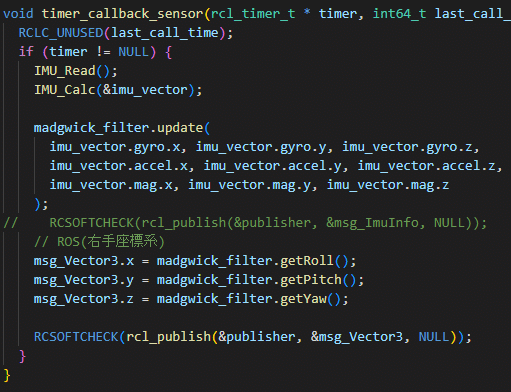
1. センサを読み取り
2. madgwick.filter()のコール
3. とりあえずVector3型のトピックに乗せて配信
2. 実行
ラズパイピコにソフトを書き込み、エージェントを起動すると・・・
ちなみにセンサを上向きにおいて動作させている

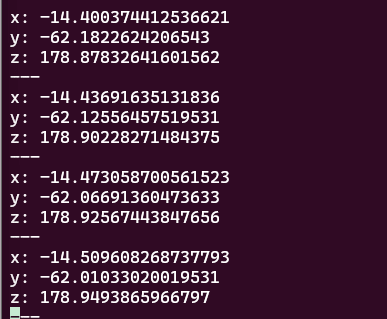
別windowを開き、トピックを購読してみる

やはりずれがあるなぁ・・・
Y軸方向を垂直においてみる
X軸方向もなんか大きく動いている…
ジャイロセンサのドリフト問題を解消しないといけないか?