肩乗りロボットの可能性

肩乗りロボットで画像検索するといろいろな試みが出てきて面白いのだが、なんといっても有名なのはこの2人。右側がIntelの研究者Michael McCoolさんとEdisonロボットのRalph。左側がAlex Glowさんとフクロウ型ロボットArchimedes。2014年にRalphを(おそらくはIntel Edisonの販促のために)開発したMichaelさんは生みの親、自称ハードウェアナード(オタク)として電子工作を啓蒙しているAlexさんは育ての親というイメージだ。2人とも肩乗りロボットのことをfamiliarと呼んでいる。「相棒」みたいなニュアンスだろうか。
Meeting of familiars, with Michael McCool and Ralph, at ROBOTIS! https://t.co/kp0MZZ3fWS pic.twitter.com/oFohwDMObp
— alex ☆ glow (@glowascii) June 24, 2018
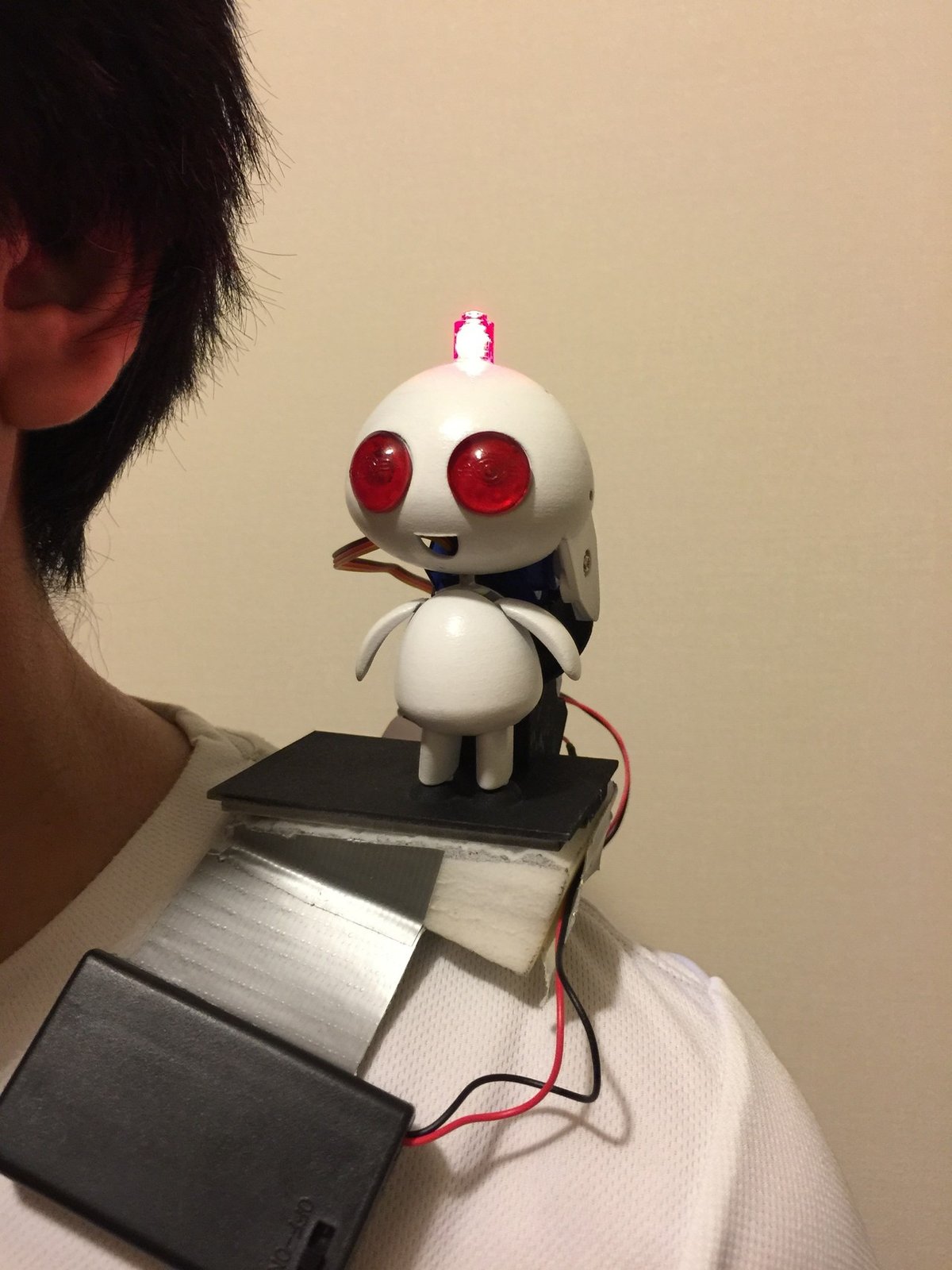
そして下の写真が僕らチーム・べゼリーが2015年から地味に開発し続けている「肩乗りベゼリー」。2015年のMashup AwardsとCEATEC2015に出展したのが最初で、機能を変更したり、よりコンパクトになるように工夫したりしながら今に至る。


ご覧の通りロボットを肩に乗せる行為は技術系展示会の会場内という特殊なシチュエーションでないかぎりとても恥ずかしいので、「肩乗りベゼリー」は今のところ販売する予定は無く、市販の「ベゼリー:ラズパイ基本キット」などの台座部分をカスタマイズして作っている。
どんな用途がベストなのか模索しながら作っているため、機能も色々と変わっている。最初に作ってMashUp Awardsに応募したのは、暗い夜道を歩く女性のためのガードマンロボットだった。距離センサーが後方を向いていて、何者かが背後から近づいてくると頭のサイレンを鳴らす。
ArduinoやESP32、M5-Stackを使っていた時期もあるが、最近はRasperry Pi 3 model A+を使うことが多い。ロボット頭部にカメラを内蔵し、2019年のCESでは自動撮影で静止画を撮りまくってみたし、MakerFaireKyoto2019ではOpenCVで顔認識をさせて喋らせてみた。MakerFaireTokyo2018では腰のジョイスティックで直接操作するようにしたし、2019では距離センサーに反応させて喋らせてみた。本当はマイクをつけて肩のロボットと会話したいのだが、展示会の会場内は騒がしくて音声入力が巧くいかないし、Wi-Fi接続が困難なのでクラウドの対話システムを利用しにくいという事情があり、まだ試みていない。
さて、こんな感じでいろいろと挑戦しているわけだが、結局のところ肩乗りロボットは役に立つ(恥ずかしさを上回るだけの有益性がある)のだろうか?単に肩の上に乗るスマートデバイスというだけであれば、ソニーの肩乗せスピーカーやキャノンの肩乗せカメラのような実用的なものがすでに発売されているわけだが、果たしてそれが生き物を模した形をして、動く必要があるのだろうか?
結論を言うと、肩乗りロボットは良くある「人間と対話するロボット」ではなく、「人間どうしのコミュニケーションを活性化するロボット」として非常に大きな可能性を秘めているのだ。実際、SXSWやCESのEureka Parkでべゼリーを肩に乗せて会場内を歩き回ってみたところ、いろいろな人に声をかけられた。男性からは「それ何だ?」という純粋な疑問を投げかけられ、女性からは「とても可愛い(adorable)わ!」と喜んでもらえた。少なくともコミュニケーションのきっかけづくりとして役に立つことは証明済みなわけだ。
今は単純な機能しか持ち合わせていないが、今後改良をしていけば可能性はさらに広がる。例えば人と人の会話が途切れて気まずくなったとき、それを察知して話題を投げかけてくれたらどうだろう。2人のプロフィールを比較して自動的に共通点を見つけてくれたり、直接聴くのはちょっと気が引けるようなことを、ロボットが素朴に質問してくれたらどうだろう。犬を散歩させているとき、犬どうしがじゃれあったことで飼い主どうしも知り合いになってしまうように、人と人を結びつけるロボットも作れるかもしれない。
ロボットに「気まずい沈黙」を感知させる技術が実用化されるまでにはまだ時間がかかりそうだが、今できることから進めておいて、来たるべき時代を楽しみにしたいと思っている。