
Intel RealSenseで物体検出してみた話

はじめに
なぜこれをやろうとしたのか軽く述べておきます
私は某理系大学の学生でロボットの制御経験があり、将来はエンジニアを目指しているため、プログラミングや制御、電子工作には大変興味があります
そしてこの度、友人から研究のためにRealSenceの環境構築を手伝ってほしいという依頼を受けたので、少し遊んでみたというのが経緯になります
それでは本編へどうぞ
環境
ubuntu 22.04LTS
ROS2 humble
Intel RealSense D435
環境構築の手順
自分の場合はgithubの手順に沿って行いました
以下にリンクを貼っておきますので、詳細はそちらをご覧ください
また、コマンドも載せていますのでターミナルで実行してください
RealSenseのドライバーとライブラリのインストール
# Intel RealSenseリポジトリの追加
sudo apt-get update
sudo apt-get install -y curl
curl -sSf https://raw.githubusercontent.com/intel-ros/realsense/master/realsense.key | sudo apt-key add -
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
# RealSenseパッケージのインストール
sudo apt-get update
sudo apt-get install -y librealsense2-dev librealsense2-utils
sudo apt-get install -y python3-pip python3-dev build-essential cmake git libopencv-devAnacondaの準備
# Anacondaをダウンロードしてインストール
wget https://repo.anaconda.com/archive/Anaconda3-2023.03-Linux-x86_64.sh
bash Anaconda3-2023.03-Linux-x86_64.sh
# 仮想環境の作成
conda create -n yolox_realsense python=3.8
conda activate yolox_realsensePyTorchとその他依存関係のインストール
# PyTorchのインストール(CUDA対応のGPUがある場合)
pip3 install torch torchvision torchaudio
# YOLOXとその他の依存関係
pip install opencv-python
pip install cython
pip install 'git+https://github.com/facebookresearch/pycocotools.git#egg=pycocotools'
git clone https://github.com/Megvii-BaseDetection/YOLOX.git
cd YOLOX
pip install -v -e .
pip install pyrealsense2ここまでできれば環境構築は終了です
次はpythonのプログラムを書いて実行していきます
実際に用いたコード
import rclpy
from rclpy.node import Node
import cv2
import numpy as np
import pyrealsense2 as rs
from ultralytics import YOLO
from cv_bridge import CvBridge
import time
class RealSenseYOLONode(Node):
def __init__(self):
super().__init__('realsense_yolo_node')
# RealSenseの設定
self.pipeline = rs.pipeline()
self.config = rs.config()
# デバイスの確認と設定
try:
# 利用可能なデバイスの検索
ctx = rs.context()
devices = ctx.query_devices()
if len(devices) == 0:
self.get_logger().error('No RealSense devices found!')
return
# 最初のデバイスのシリアル番号を取得
device = devices[0]
self.get_logger().info(f'Found device: {device.get_info(rs.camera_info.name)}')
# ストリームの設定
self.config.enable_device(device.get_info(rs.camera_info.serial_number))
self.config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
self.config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
# 高度な設定
self.align = rs.align(rs.stream.color)
# パイプラインの開始
pipeline_profile = self.pipeline.start(self.config)
# ストリーミング開始後のウォームアップ待機
self.get_logger().info('Waiting for device to warm-up...')
time.sleep(2)
# デバイスの設定
device = pipeline_profile.get_device()
depth_sensor = device.first_depth_sensor()
depth_sensor.set_option(rs.option.enable_auto_exposure, 1)
# Advanced modeの設定(利用可能な場合)
if device.supports(rs.camera_info.product_line):
advanced_mode = rs.rs400_advanced_mode(device)
if not advanced_mode.is_enabled():
advanced_mode.toggle_advanced_mode(True)
time.sleep(1) # 設定の適用を待機
except Exception as e:
self.get_logger().error(f'Error initializing RealSense: {str(e)}')
return
# YOLOモデルの読み込み
try:
self.model = YOLO('yolov8n.pt')
except Exception as e:
self.get_logger().error(f'Error loading YOLO model: {str(e)}')
return
# 結果表示用のウィンドウ名
self.window_name = 'RealSense YOLO Detection'
cv2.namedWindow(self.window_name, cv2.WINDOW_AUTOSIZE)
# タイマーの設定(20Hz - より安定した動作のため)
self.timer = self.create_timer(1/20, self.timer_callback)
self.get_logger().info('RealSense YOLO Node has been started')
# フレーム取得失敗回数のカウンター
self.frame_failure_count = 0
self.MAX_FAILURES = 5
def timer_callback(self):
try:
# フレームの取得(タイムアウト設定を3秒に延長)
frames = self.pipeline.wait_for_frames(timeout_ms=3000)
if not frames:
self.frame_failure_count += 1
if self.frame_failure_count >= self.MAX_FAILURES:
self.get_logger().error('Multiple frame acquisition failures. Restarting pipeline...')
self.restart_pipeline()
return
self.frame_failure_count = 0 # 成功したらカウンターをリセット
# フレームの位置合わせ
aligned_frames = self.align.process(frames)
color_frame = aligned_frames.get_color_frame()
depth_frame = aligned_frames.get_depth_frame()
if not color_frame or not depth_frame:
self.get_logger().warn('Invalid frames received')
return
# カラー画像をnumpy配列に変換
color_image = np.asanyarray(color_frame.get_data())
depth_image = np.asanyarray(depth_frame.get_data())
# YOLO検出の実行
results = self.model(color_image)
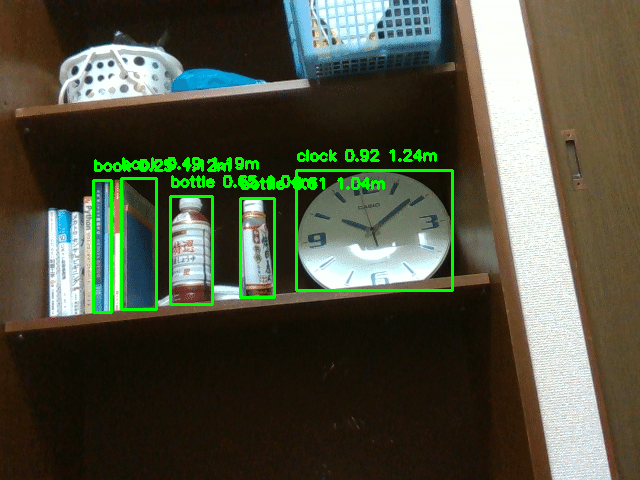
# 検出結果の描画
for result in results:
boxes = result.boxes
for box in boxes:
x1, y1, x2, y2 = box.xyxy[0]
x1, y1, x2, y2 = int(x1), int(y1), int(x2), int(y2)
cls = int(box.cls[0])
conf = float(box.conf[0])
class_name = self.model.names[cls]
center_x = (x1 + x2) // 2
center_y = (y1 + y2) // 2
depth_value = depth_frame.get_distance(center_x, center_y)
cv2.rectangle(color_image, (x1, y1), (x2, y2), (0, 255, 0), 2)
label = f'{class_name} {conf:.2f} {depth_value:.2f}m'
cv2.putText(color_image, label, (x1, y1 - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
# 結果の表示
cv2.imshow(self.window_name, color_image)
key = cv2.waitKey(1)
if key & 0xFF == ord('q'):
self.destroy_node()
rclpy.shutdown()
except Exception as e:
self.get_logger().error(f'Error in timer callback: {str(e)}')
self.frame_failure_count += 1
if self.frame_failure_count >= self.MAX_FAILURES:
self.restart_pipeline()
def restart_pipeline(self):
"""パイプラインを再起動する"""
try:
self.pipeline.stop()
time.sleep(1)
self.pipeline.start(self.config)
time.sleep(2) # ウォームアップ待機
self.frame_failure_count = 0
self.get_logger().info('Pipeline successfully restarted')
except Exception as e:
self.get_logger().error(f'Failed to restart pipeline: {str(e)}')
def __del__(self):
# リソースの解放
try:
self.pipeline.stop()
cv2.destroyAllWindows()
except:
pass
def main(args=None):
rclpy.init(args=args)
node = RealSenseYOLONode()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
finally:
if node:
node.__del__()
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()正直Pythonはあまり得意ではなく、RealSenceでの開発も初めてだったためだいぶ苦戦しました
無駄な処理等あればご指摘いただけると幸いですm(__)m
また、以下にgithubのリンクも貼っておきます
ご自由にお使いください
コマンドで実行
自分のファイル名はrealsense_yolo_detector.pyだったのでこのファイルがあるパスに移動してターミナルで以下のコマンドを実行します
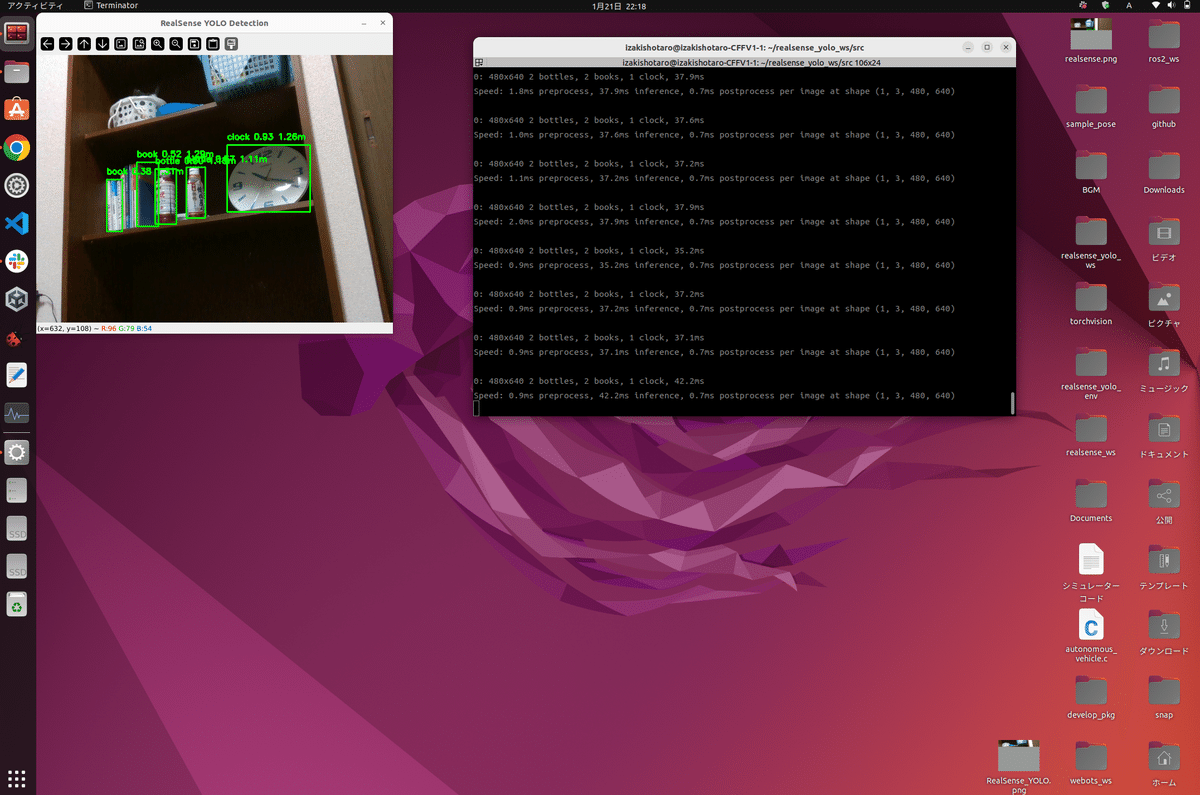
python3 realsense_yolo_detector.pypythonファイルが実行され、Realsenseを用いた物体検出が行われます
これで本編は終了です
お疲れさまでした!
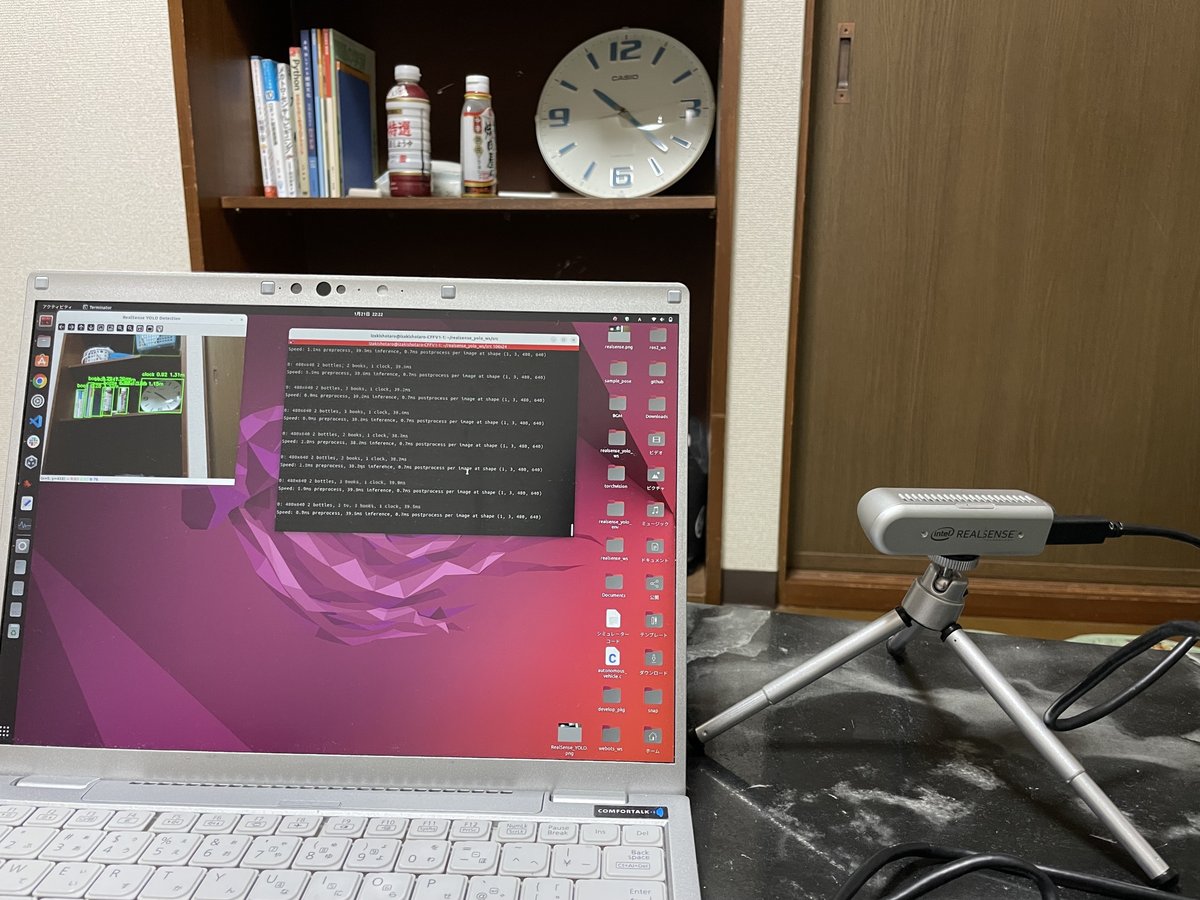
開発環境の写真も載せておきます
最後に
ここまで読んでいただき、ありがとうございました
今回はRealSenceを用いた物体検出の記事を書かせていただきましたが、いかがだったでしょうか
ご指摘等あれば、コメントしていただけると今後の励みになりますので、今後ともよろしくお願いします