
ロボット開発進捗(2024年8月現在)

トクイテンの森です。
台風も上陸して猛威を振るっているところですが、いかがお過ごしでしょうか?トクイテンの知多農場も当初は知多半島付近を直撃するとの予報だったので台風対策を行いました。その後、九州方向から日本列島を縦断する経路に変化しましたが、被害のないのを願うばかりです。
収穫ロボットの進捗状況
特許の件もあり、あまり開発の進捗情報のお知らせができていませんでしたが、今回の記事では少し紹介していきます。
現在、来週定植して12月から収穫予定のトマトの収穫(の一部)を本格的にロボット化するための開発を進めています。
新しく開発する狙いは、収穫範囲の拡大とレール上の自動移動による収穫作業の全自動化です。全自動化といっても、レールに載せるまでは人間の管理者による操縦もはいりますが、大きな進歩だと考えています。
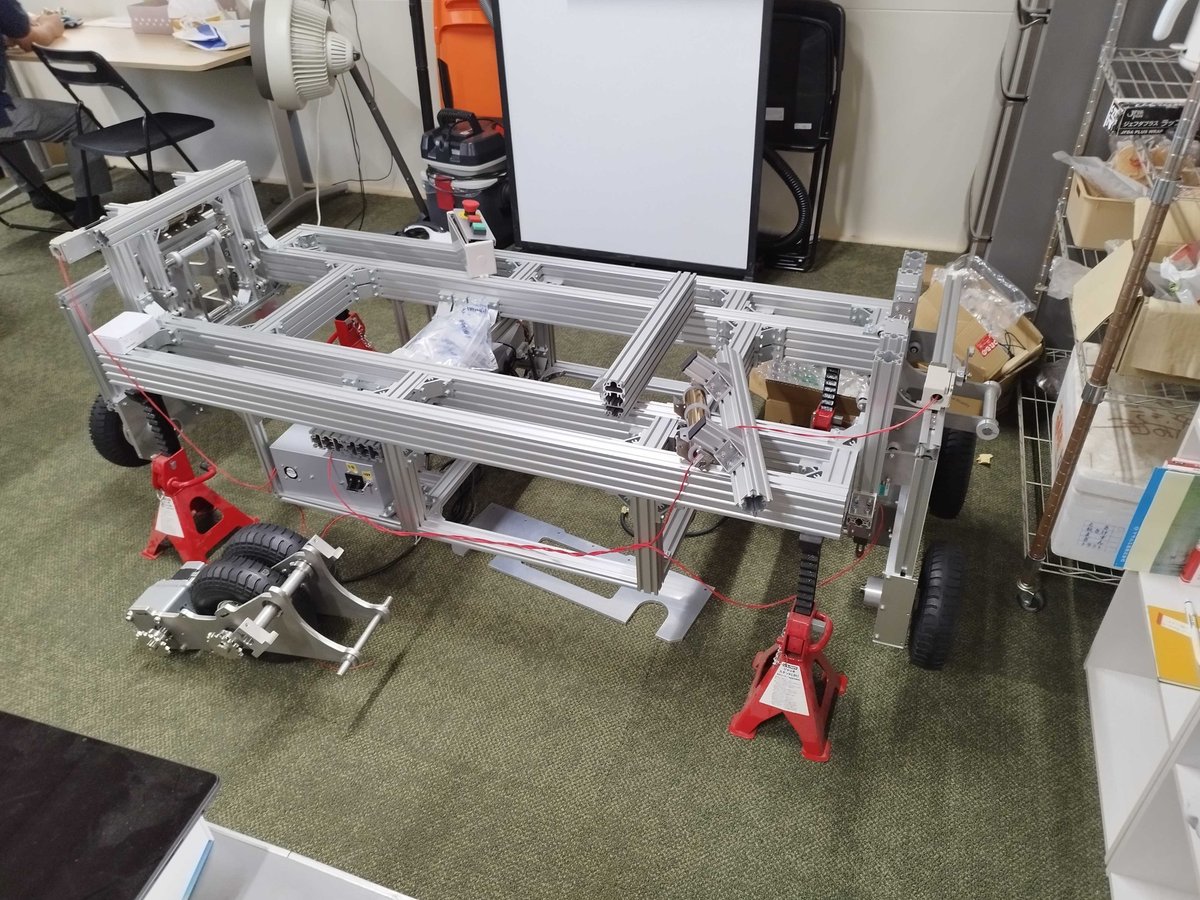
xyzの直行リンクを構成することで収穫範囲拡大
旧型の収穫ロボットではアームがシリアルリンク構造であったため収穫範囲が限定されてしまっていた。アームの構造をxyz方向の直行駆動にすることで、収穫できる範囲を広げることができました。


レール走行とレール間移動
通路に設置したレールの上を走行したり、レールを外れて別のレールへ移動したりするための機構を作っています。レール上は自動走行ですが、レール間は当面管理者の操作で動作させる予定です。
現在は大体組み上がったところで、近々レール上での動作テストも予定しています。
新規特許取得
また新たな特許が取得できました。これまで吸引方収穫方式に関する2件の特許を取得してきましたが、今回は移動ロボットの位置認識に関するものになります。今回に関しては前二つと違い一発で認められることはなく(これが普通)、反論と軽微な修正を行なって認められることになりました。また、今回もスタートアップへの支援であるスーパー早期審査をお願いしていたので、拒絶理由通知への対応も含めて、特許査定を受領するまで全て3ヶ月で終了しました。非常にありがたい制度です。
特許が公開されたら詳しく解説したいと思います。
まとめ
トクイテンでは収穫ロボットを中心としたロボット開発を進めています。順調に進めてはいますが、農場の全自動化に向けてロボット開発の仲間が必要です。ご興味を持ちましたら、是非以下のリンクから会社説明会にご参加ください。
この記事が気に入ったらサポートをしてみませんか?