
トクイテンロボットアーム開発進捗

申請書や報告書を人工知能に書いてもらいたいトクイテンの森です。先週はペーパーワークに忙殺されたnoteが書けませんでした。
今回はトクイテンで開発しているロボットアームの開発進捗です。
前回は2022年8月に書いているので、ご興味のある方は比較しながらご覧になってみてください。
収穫ロボットのためのロボットアーム
まず収穫ロボットの構造としてスカラ型(SCARA)とすることに決定しました。スカラ型アームは水平多関節ロボットとも呼ばれ、水平リンクと上下方向の昇降機からなる構造となっています。山梨大学の牧野洋教授(当時)が中心となって発明されたもので商業的にも大成功しました。スカラ型の特徴として、上下方向の構造が頑健で動作のための計算がしやすことが挙げられます。
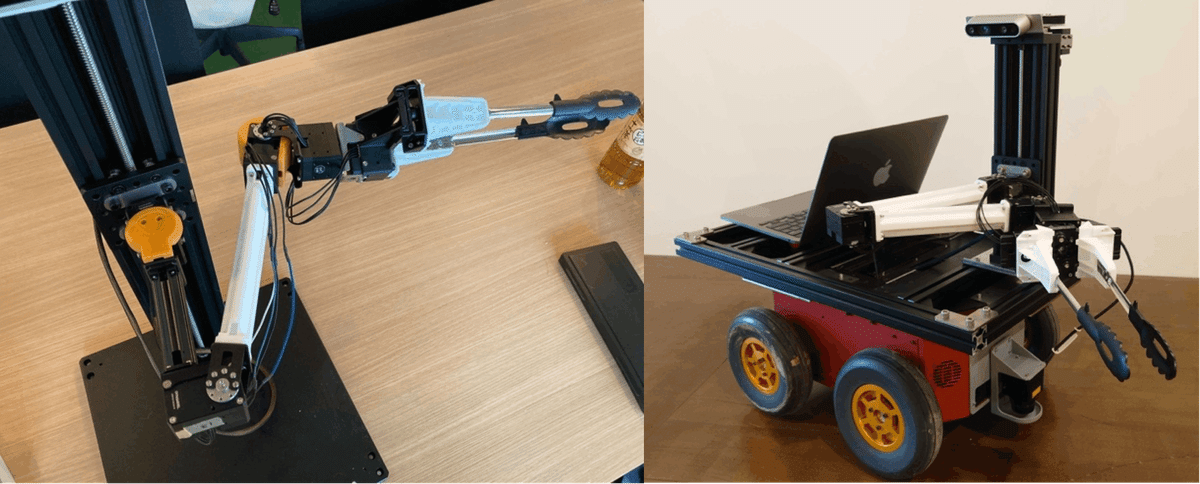
手軽な素材としてROBOTIS社の4自由度のアームとなっているOpenMANIPULATOR-Xがありましたので、これを水平方向に取り付け直してアームを開発しました。元々あったリンクのフレームを3Dプリンタ作成し直して長くするなど改造しています。
水平方向のアームの自由度は肩・肘・手首の2自由度(水平・捻り)の4自由度です。目標となる位置を指定すると関節角度が計算される「逆運動学」の式をプログラミングして動作を作っています。
上下方向は格安でボールネジタイプの昇降機が販売していたので、これを購入して取り付けました。昇降動作は遅かったのでストレスでしたが、最初のバージョンとして動作検証には十分でした。
自社開発アーム
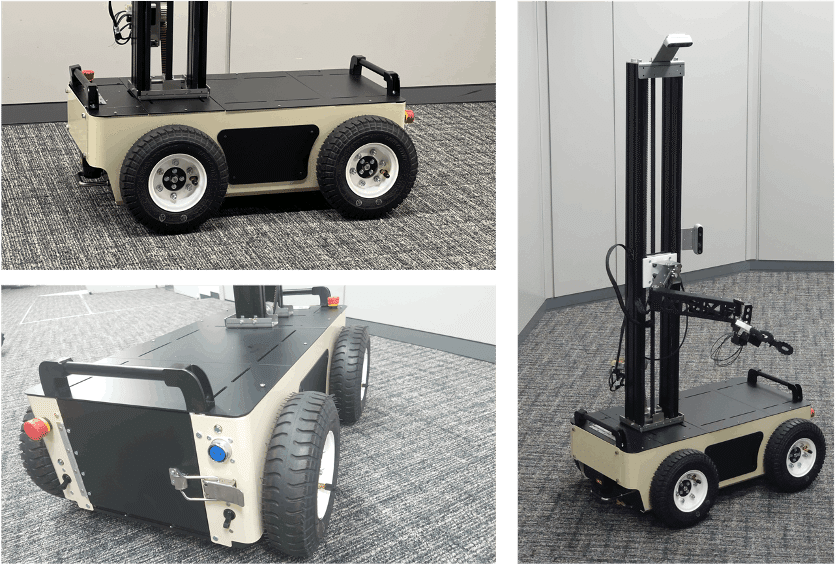
次に自社開発でゼロからアームを製作しました。構造は前回と同じですが、アームの長さが変わっています。構造は板金で製作しています。また昇降機も自社開発していて、収穫範囲が大幅に広がりました。

問題点としては、全バージョンに引き続きサーボモーターが関節に直結しているため、モーターへの負担が大きく剛性に限度があるということで、長期の運用には適していない可能性があるということでした。
自社開発アームの最新バージョン
最新のバージョンでは、サーボモータをリンクの中に埋め込んで、歯付ベルトで肩と肘の関節を駆動するという方式になっています。肘の関節で一段下がっている構造になっています。これにより関節の剛性が高まり耐久性も向上していると考えています。また、リンクの長さも延長して収穫範囲を広げています。

上から見たリンク構造は最初のバージョンと同じなので、ソフトウェア上の変更はリンク長や上下のオフセットのみになっているので、基本的なアルゴリズムの変更は必要ありません。パラメータや動作の調整を行いながら、収穫性能を向上したいと考えています。
今後の方針
ハードウェアとしては、アームのバージョンアップは一旦停止して、ハンドの改造を進めようかと考えています。また、葉かき(余分な葉を切り取る)のための電動ハサミについても開発していますが、少し危ない形状になっているので安全性を高めていきたいと考えています。