【日本語訳】Kudan News 2022.5.9.「How to Select the Best 3D Lidar for SLAM」


画像を見て、まず何が目に飛び込んできましたか?
左下の暗い円筒形のものから目が離せなかった方は、きっとこの記事を楽しめるでしょう。これはライダーです。
今回は、自律走行車やロボットの企業が複数出てきたことで、注目されるようになったこのセンサーについて、基本的なことを説明します。
SLAMの定義は、Xiang GaoとTao Zhangによるもので、私たちの標準の概念です。
"Simultaneous Localization and Mappingは通常、特定のセンサーを装備したロボットや移動する物体を指し、「先験的な情報なしに動きを推定し、周辺環境のモデルを構築する」とあります。使用するセンサーに基づき、我々は異なる種類のSLAMを持つことができます。
センサーとして3Dライダー(Light Detection and Rangingの略)を使用する場合、3D Lidar SLAMと呼ばれます。簡単に言うと、ライダーが提供する現在の点群とライダーの過去のフレームに基づく既存の点群を比較して、ライダーがどこにいてどのように動いているかを推定するのが3D Lidar SLAMです。しかし、3D Lidar SLAMを始めようとする人から最も多く聞かれる質問があります。どのライダーを選べばいいのか?という疑問です。
この記事では長年にわたって培ってきたライダーSLAMに関する知識と経験、そしてユースケースに最適なライダーを選ぶための方法を紹介します。
それでは、さっそく見ていきましょう。
ビーム放射/ステアリング機構と深度誤差。これらは重要でしょうか?(詳細は後述)
ビーム出射・操舵機構とは、ライダーがビームを出射し操舵する仕組みのことです。これによって、ライダーは2種類に大別されます。
1)スピニングライダー ライダー信号を発信し、後方散乱された放射スペクトルを調べる。
2) 固体ライダー 1本のレーザー光を照射し、戻ってきた3次元データを飛行時間型センサーアレイで取得する。
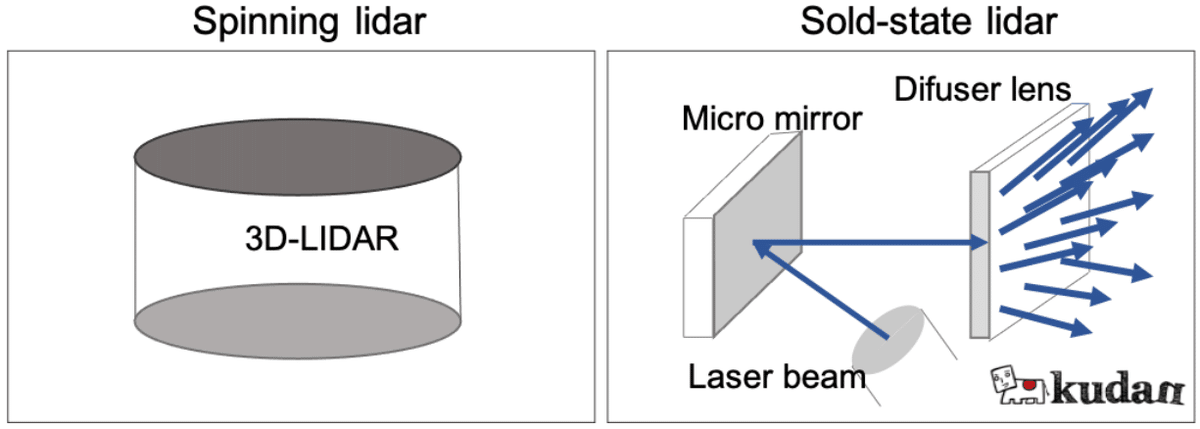
仕組みは違っても、SLAMでは、ライダーが(x、y、z)情報とそのタイムスタンプを含む点を生成できればよく、強度やマルチリターンなどの情報は有用ですが、基本的なライダーSLAMでは必須ではありません。
しかし、固体ライダーを使用するとFoV(Field of View)に影響が出ますので、もう少し詳しく説明します。
深度誤差とは、3Dライダーを使って深度を測定する際に生じる誤差のことで、これは避けられないものです。目安としては、ほとんどの3Dライダーで±1cmから±5cmの範囲になります。十分なFoVがあれば、この誤差が±1cm~±5cmの範囲内であれば、定位に顕著な差が生じることはほとんどありません。
SLAMシステムではセンサーの位置を計算するために多くの点を用いて現在のフレームと前のフレームの位置合わせを行うため、各点の誤差は全体として打ち消される。しかし、測量用途など、1cmの誤差も許されないようなシャープな点群を作成する場合には、これらの誤差は非常に重要です。
一般に、ロボット用途では、深度±1cm~±3cmの誤差よりも、次に説明するFOVとレンジの方がはるかに重要なのです。
視野角と測定範囲。重要なポイント
視野(FoV)とは、任意の瞬間に見える観察可能な世界の範囲のことです。ライダーの視野が広ければ広いほど、ある時点まではより堅牢で正確なSLAM性能を期待することができます。
さまざまなユースケースにおいて、必要とされる水平方向と垂直方向のFoVを考慮することが極めて重要です。屋内では、高さの異なる多くの物体がセンサーの近くに存在する可能性が高いため、より広い垂直方向のFoVが重要です。十分な垂直方向のFoVがないと、高さの異なる物体を適切に捕捉できず、SLAMのパフォーマンスが低下する可能性があります。
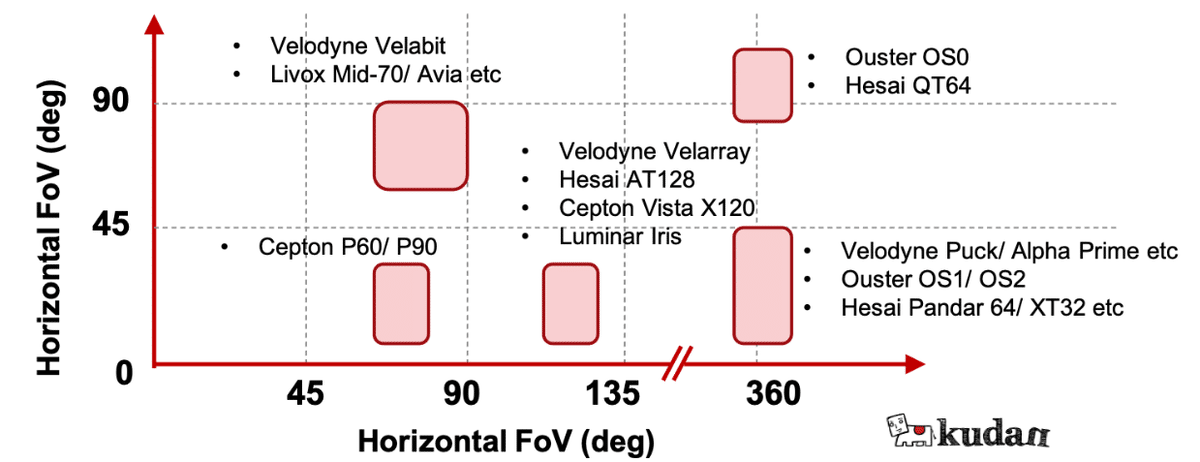
ライダーには、固体ライダー(Solid-State Lidar: SSL)という種類もあり、回転式3Dライダーの制限を克服しています。しかし、限られたFoV(一般的に約1800)を克服するために、2つまたは3つのSSLを組み合わせて3600のFoVを達成することができます。しかし、合成されるライダー間で、外部較正を維持する必要があります。
センサーのレンジとは、測定可能な適用パラメータの最大値と最小値のことである。多くの場合、最小値はローカライズにそれほど重要ではなく、最大値のみが問題となります。
一般に、SLAMの性能としては、レンジが長いほど有利です。しかし、屋内では100mのライダーと200mのライダーの差はあまりありません。ある範囲(例えば100m)内に検出できる物体が十分にある場合、より高い範囲(例えば200m)からの性能向上はわずかなものでしょう。
したがって予算に応じて屋内で十分な物体を検出する場合はより長いレンジのライダーよりもより高いFoVのライダーを選択することをお勧めします。
屋外で使用する場合は、より高いレンジが要求される開放的で大きな倉庫での使用例を除いて、一般に50mのレンジで十分です。
ライダーのレンジを選択する際には、反射率や検出確率をどの程度で測定するかという重要なポイントもあります。
反射率とは、物体からビームが跳ね返ってくる可能性を示すものです。道路標識の多くは反射率の高い材料でコーティングされていますが、路面は一般的に黒色で反射率が低いです。もちろん、反射率の高い物体がライダーから同じ距離にあれば、より検出しやすくなります。PoD(Probability of Detection)とは、検出可能なすべての物体に対する、検出された物体の割合のことです。ライダーからの距離が近いほど、同じ反射率であってもPoDは高くなります。つまり、反射率の高い物体を低いPoDで測定すれば、ライダーの測定範囲はより長くなるのです。
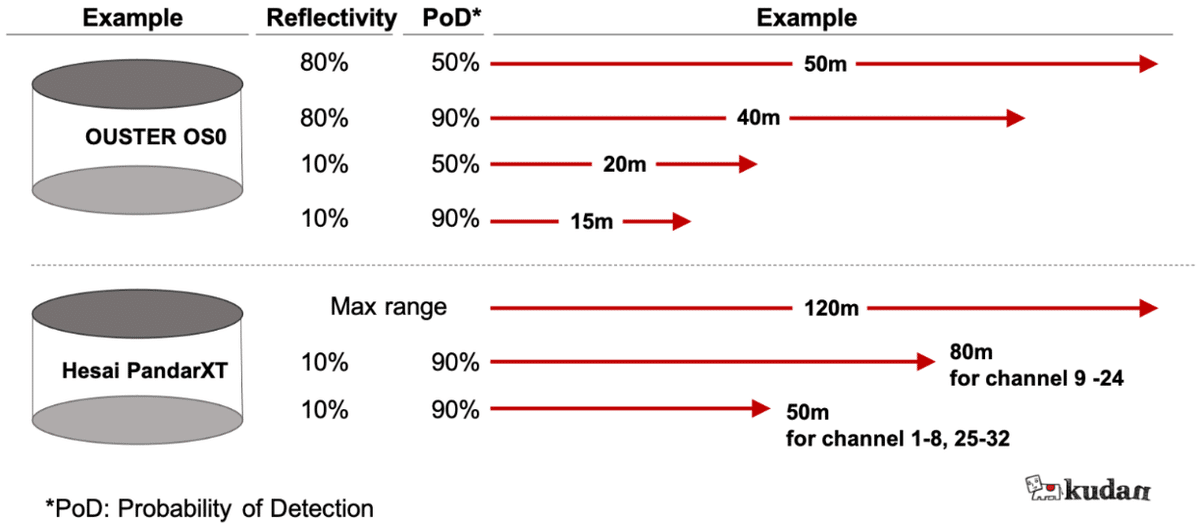
ライダーには、反射率10%、PoD90%でレンジを描いているものもあれば、反射率80%、PoD50%でレンジを規定している機器もあります。このような場合、達成可能な範囲を直接比較することは困難である。上図は、反射率と検出確率の値によって変化する範囲を示しています。
解像度とフレームレート。ユースケースに最適なスペックは?
解像度やチャンネル数は、ライダーが1フレームまたは1秒間に生成できるポイント数を示しています。
回転式ライダーでは、チャンネル数が解像度を表します。
つまり64チャンネルのライダーは32チャンネルのライダーよりも高い解像度を持ちます。SLAMの性能は、分解能が不足すると著しく劣化します。
しかし、ある程度の解像度を確保すると、SLAMの性能は大きく向上しません。
例えば、水平方向のFOVが3600で垂直方向のFOVが広いライダーと、それよりかなり高い解像度でFOVが狭いライダーを比較した場合、前者の方が性能が良くなる可能性が高くなります。これは、FoVが限定されている場合、解像度が高くてもあまり影響がないためです。
フレームレートは、1秒間に連続したフレームをキャプチャする頻度です。この仕様は、ビジュアルSLAMのカメラと似たような挙動をします。
追尾したい動きが速いほど、高いフレームレートが要求されます。フレームレートが高いほど、センサーはフレーム間の重なりを大きくすることができ、SLAMの性能を向上させることができる。
最後に
3Dライダーは、ロボット、ドローン、デジタルツイン、自律走行車などに広く採用されています。その性能向上、より安定した信頼性、より手頃な価格により、過去10年以上の間にこの分野でのユースケースが急速に増加しました。これは、これらの分野での3DライダーSLAMの採用も後押ししています。
そのため、この記事があなたの3DライダーSLAMの旅の良い出発点になることを願っています。あなたのユースケースや要件に応じたアドバイスが必要な場合は、喜んでお手伝いさせていただきます。