
【ロボットの基礎知識(07)】GPS、GNSSとは

皆さん、こんにちは、JapanStep(ジャパンステップ)です。
いつもJapanStep公式note、MetaStep(メタステップ)をお読み頂き、ありがとうございます。
今秋11月にローンチ予定のJapanStepメディア第2弾「RoboStep(ロボステップ)」を控え、今のうちからロボットの基礎知識を学ぼうという本企画。
前回までは各ロボットの種類について学びましたが
ここからは、ロボットに活用される「技術」にフォーカスして解説します。
今回のテーマは、私たちのスマホや車といった日常に溶け込んでいる「GPS」。実は具体的な仕組みを知らない方も多いのではないでしょうか?本記事では、GPSと比べると認知度は低いものの、多くの現場で活用されている「GNSS」と併せて解説します。
GPSと「GNSS」
一般的に知られているGPS(ジー・ピー・エス)という言葉。これは「Global Positioning System」の略で、アメリカが打ち上げた衛星を用いて行う位置測位のみを指します。
1か国のみの測位なので、精度はそれなりといった所。日本では初期からGPSを利用していたため、衛星測位システムを指してGPSと呼ぶことが多いんですね。
アメリカ以外にも各国で衛星が存在し、それらを総称してGNSS(Global Navigation Satellite System、全球測位衛星システム)と呼びます。
・QZSS(日本)
・GLONASS(ロシア)
・Galileo(EU)
・Beidou(中国)
GNSSとGPSの大きな違いは測位精度です。GPSは衛星の数が限られることから、測位衛星からの信号がビルや高い山に遮られることで測位精度が不安定になる場合もあり、測位の精度に限界があります。
その点、GNSSは複数の測位衛星から信号を受信できるため、GPSよりも高精度の測位が可能です。
そのため、現在ではGPSと呼ばれていても実際はGNSSを利用しているケースが多く見られます。
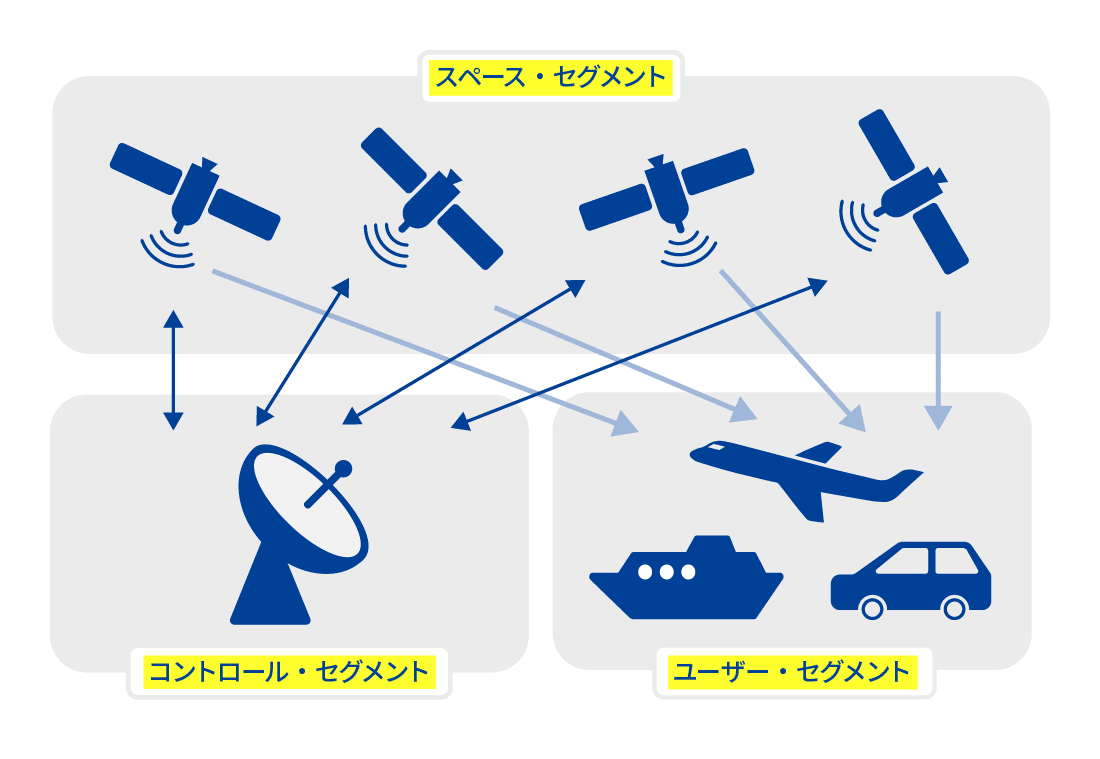
GNSS は、下記3つで構成されています。
・GNSS衛星(高度10~20kmで自分の位置を定期的に発信。各国の衛星を合わせて100機近く存在)
・地上管制(地上から衛星の正確な軌道を常に計算し、定期的に衛星へ位置情報を送信)
・GNSS受信機(カーナビや飛行機内に存在。衛星からの信号を受信し、衛星までの距離を計測)
衛星の軌道情報や衛星の時計にも誤差があり、また、上空の状況(電離層や対流圏)によっては、電波の進む速度も変化します。そのため、5〜10m程度の精度が一般的です。スマホやカーナビのGPS(GNSS)は、この仕組みで動いています。
そんな中、誤差数cmの精度を実現する技術として、ここ数年一般的に使われ始めたのが「RTK」という仕組み。
ここからは次回お話しましょう。それでは!
本日もお読み頂き、ありがとうございました!
スキやフォローを頂けると、「ロボットの基礎知識」の執筆担当者も更新を頑張れると思いますので是非応援よろしくお願いいたします。
JapanStepの運営会社クロスアーキテクツへのお問い合わせやお仕事のご相談は、公式HPのお問い合わせフォームよりお気軽にどうぞ。
最後までお読み頂きありがとうございます! Web3・メタバースのビジネス活用に興味のある方、将来Web3・メタバース業界で働きたい学生さんやクリエイターの皆さん。是非WEBマガジン「MetaStep(メタステップ)」を応援頂けると嬉しいです。
