Raspberry Piでジャイロを使ってみる:ハードウェア

Raspberry Piで姿勢制御したいと思ったら傾きを検知できるセンサーである「ジャイロ(Gyro)」が必要ですよね。今回はそんなジャイロを扱ってみようと思います。
用意する物
LSM9DS1搭載 9軸センサモジュール
Adafruit社製のジャイロセンサーです。ジャイロだけでなく加速度センサー、磁力計そして温度計も付いている中々豪華なセンサーです。もっと安いジャイロセンサーもあるのですが、I2C接続が可能な事と、Adafruitから専用のPythonライブラリが提供されている利点からこれを選んでみました。
基板に接続コネクタは無いので、同封されている端子を必要な分だけカットして半田付けする必要があります。これについては後述します。
ジャンパーワイヤー
センサーとラズパイを繋げるのに必要です。センサーもラズパイも雄ピンなので、必要なのは両端共に雌ピンのジャンパーワイヤーになります。またI2C接続のためケーブルは4本(VIN, GND, SDA, SCL)必要になります。
基板にピンを半田付けする
では最初に基板に付属のピンを半田付けしましょう:

上の赤い個所がI2C接続で必要になるピンです。左から、VIN(3~5Vの入力)、3V3(3.3Vの電源出力)、GND(グラウンド)、SCL(I2Cのクロック同期)、SDA(I2Cのデータ入出力)です。この内3.3Vの電源出力は使いませんが、そこだけピンを抜くのも面倒くさいので、一緒に半田付けしちゃいます。
16連の接続ピンの端から5番目の筋に爪をかければ手で折れます。ピンの長い方が基板の表側に来るように裏から半田付けします:

こういう長いピンは裏から半田付けするのがちょっと大変です。ブレッドボードに予めピンを挿しておいてから半田付けすると良いかもしれません。
Raspberry Piと接続
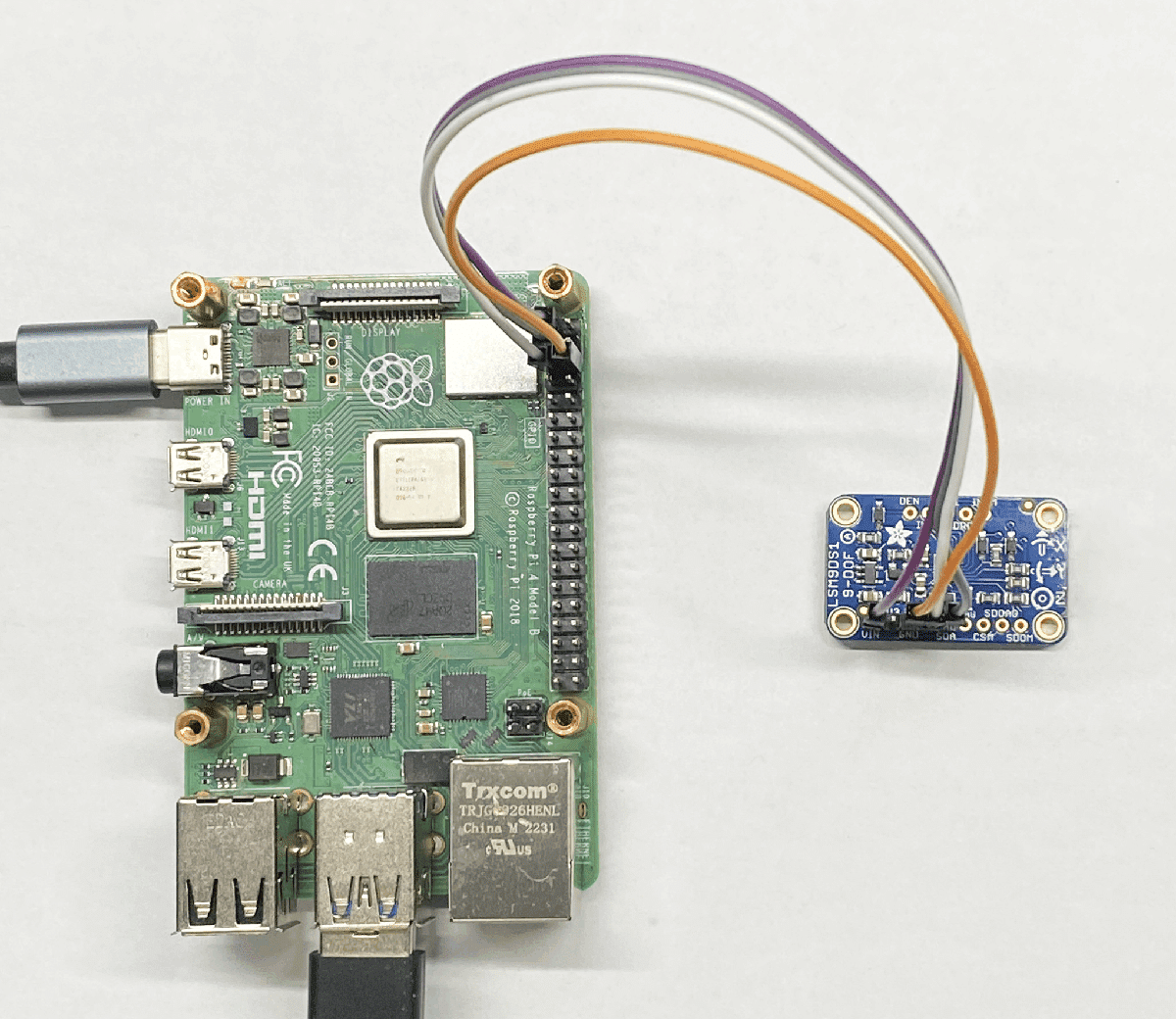
ジャイロ基板とラズパイとをI2C接続します(ラズパイの電源は落として下さい):

ラズパイのGPIO2にSDAを、GPIO3にSCLをそれぞれ接続します。これは固定なので他のGPIOに繋いではいけません。
接続したらラズパイの電源を入れましょう。
ジャイロ基板の接続を確認
ジャイロ基盤がI2C機器として認識されているか確認してみましょう。ターミナルで以下のコマンドを入力します:
i2cdetect -y 1I2C機器が接続されている場合、以下のように一覧表の特定位置に数字が表示されます:

0x6bがこの基板のIDのようです。
これでハードウェアの準備は出来ましたので、次回はPythonからジャイロ基板を操作して姿勢情報を得てみましょう。
<次回>