
NASA のタイタン探査計画 Dragonfly のコンセプト

以前の投稿で,火星でヘリコプターが活躍する未来が来ることを述べました。
この記事の最後で,他の飛行探査計画である Dragonfly について触れました。今回はこの Dragonfly のコンセプトをまとめます。
はじめに断っておきますが,コンセプトがまとまっているソースとしてこちらの 2018 年の論文をベースにしています。これは Dragonfly ミッションが NASA に採択される前の提案段階の論文であり,現時点とは異なっている点もあります。ミッションの公式サイトなどからわかる範囲で,こちらに含まれない情報を補ったり,変更点をアップデートしたりしていますが,必ずしも最新の情報とは限らない点はご容赦ください。
Dragonfly について
Dragonfly は Johns Hopkins Applied Physics Laboratory (APL) が提案し,米航空宇宙局 (National Aeronautics and Space Administration, NASA) の 4 番目の New Frontiers Program として 2019年 6月27日に採択された(参考),回転翼機によるタイタンの探査計画です。
土星の衛星タイタンはかつて,NASA の土星探査機 Cassini およびそれに搭載された欧州宇宙機関 (European Space Agency, ESA) のタイタン着陸機 Huygens によって探査されました。これらの成果から,タイタンが科学的に非常に興味深い天体だということがわかった一方で,より詳しく明らかにしたいことがたくさん見つかったため,タイタンの探査が計画されたのです。

スケジュール
執筆時時点で,Dragonfly のスケジュールは以下の通りです(参考)。
打ち上げ:2027年 6月
タイタン到着:2034年
探査対象のタイタンについて

Cassini が撮影したもの。タイタンは大気に覆われ,地表は見えず輪郭は霞んでいる。
土星の最大の衛星タイタンは様々な点において太陽系で最も地球に似た天体といえます。水星より大きなタイタンは,地表を部分的に隠す有機スモッグを含んだ窒素の厚い大気に覆われており,地球以外で唯一豊富な大気を持つ天体です。太陽から遠いタイタンでは,温室効果ガスのメタンが雲を形成し雨を降らせ,湖や海として溜まっていたり川として流れていたりと,地球における水のような役割を果たしています。

メタンの海の 1 つである Ligeia Mare や,そこに流れ込む河川が写っている。
地表だけでなく,エンセラダスやエウロパなどと同様,氷の殻の下には地下海が広がっていると考えられています。この内部海は主に水からなりますが,地球の海よりもはるかに高濃度の塩を含む可能性が指摘されています。
アストロバイオロジーでは生物の 70% を構成する水を探すことが取り組みやすく第一の焦点となりますが,生命を生み出す化学プロセスは CHNOPS(炭素,水素,窒素,酸素,リン,硫黄)からなる化合物に依存しています。同じ "Ocean World" であるエウロパと異なり,タイタンは炭素と窒素に富んだ "Ocean World" なのです。
下の動画は Huygens の降下時に撮影した画像から作成されたもの(冒頭は CG )。タイタンの地形や表面の様子がよくわかります。
Dragonfly の経緯と目的
2016 年,4 番目の New Frontiers program として,NASA がタイタンかエンセラドスの "Ocean World" をターゲットとして提案したことが直接のきっかけとなりました。その際,タイタンの場合の科学目標として「有機物やメタン生成のサイクル(特に生命誕生につながる化学(以下,前生物化学と呼ぶ)に関連するもの)について理解する」と「地下の海(特にその形成進化の過程や地表との相互作用)について調べる」の 2 つが挙げられました。
New Frontiers Program は Mars Sample Return や Europa Clipper などの Solar System Exploration Program(旧 Flagship Mission) よりも小規模であるものの,Discovery Program よりも大きい,中規模ミッション枠です。過去の New Frontiers Program としては,New Horizons,Juno,OSIRIS-REx があります。
タイタンの探査に関する他の研究はありましたが,北極域の海の探査で時期的に地球と通信ができなかったり(参照),モビリティのないランダーであったり(参照)と完璧ではありませんでした。2000 年には回転翼機を用いる提案もありました(参照)が,当時想定していたのはヘリコプターで,機構的に複雑でした。
ところが現在では,自律的な着陸や着陸地選定に必要な観測や制御能力の向上に加え,センサーの小型化や自動操縦などの技術が進み,マルチローターのドローンの実現可能性は 20 年前とは比べものにならないほど高くなっています。マルチコプターではヘリコプターと異なり,モーターの回転速度によるスロットルの差で制御でき,シンプルで惑星探査にも適しています。そこで,マルチコプターを用いたタイタン探査機 Dragonfly のコンセプトが生まれたのです。
Dragonfly のコンセプト
Dragonfly はマルチコプターによるタイタンの表面の探査を行う探査機です。厚い大気のあるタイタンでマルチコプターを用いることで,ローバーのように移動探査ができるだけでなく,着陸にも Curiosity や Perseverance のようなロケットエンジンを用いたスカイクレーン(参照)も Pathfinder や Spirit/Opportunity のようなエアバッグ(参照)も不要となります。移動探査に関しても,ローバーよりも早く遠くへ行け,ローバーでは行けないようなところも探査できる,優れものなのです。
大気圏突入カプセルに収納しなければいけないことなどの制約から,ローターは 4 箇所が適切と判断されました。ローターを 2 つずつのペアとしたオクトコプターは,純粋なクワッドコプターに比べて多少の空力的損失があるものの,その強靭性(1 つのローターが壊れても問題なく冗長である)から 4 箇所に上下 2 枚のローターを配した "over-under quad octocopter layout" が採用されました(下図)。

"over-under quad octocopter layout" をとっていることがわかる。飛行時の形態を表しており,
上部に搭載された高利得アンテナ (High-gain antenna, HGA) は畳まれている。
なお,これは冒頭で述べた提案当時のものであり,現在の形状とは異なっている。
火星ローバーのような高度なサンプリングアームは高価で重いため搭載できません。代わりに 1 自由度のサンプリングドリルを 2 つ,それぞれの着陸脚に搭載することでサンプル選択性(同時に 2 箇所のサンプルが取得できる)と冗長性を確保しました。また,高密度大気があるおかげで,サンプルは空気で吸い上げて分析計に運ぶことができます。
太陽から離れ温度が低い土星圏のタイタンでは,太陽電池が使えない一方でヒーターが必要となります。したがって原子力電池 (Multi-mission radioisotope thermoelectric generator, MMRTG) が必須ですが,重量の制約から 1 つのみの搭載となり,省電力化が鍵となります。
サイエンスペイロード
ペイロードとしては,化学分析のための質量分析計 (DraMS) や γ 線・中性子分析計 (DraGNS),地学・気象学的調査のためのセンサー一式 (DraGMet),様々な観測を行うカメラ一式 (DragonCam) などが考えられています。詳細は以下の通りです。
DraMS (Dragonfly Mass Spectrometer)
高性能な質量分析計で,ペイロードのメイン
化合物の特定ができる
特に高分子炭化水素の材料や前生物化学的に関心のあるサンプル
Curiosity で活躍した SAM (Sample Analysis at Mars) 装置を活用
DraGNS (Dragonfly Gamma-Ray and Neutron Spectrometer)
γ 線・中性子を用いた元素組成分析計
機体の下の地表面の分析をサンプリングなしに行える
ナトリウム,硫黄などの微量な無機元素も検出可能
γ 線を励起させるパルス中性子発生器を搭載
厚い大気が宇宙線から地表を守っているため
炭素,窒素,水素,酸素の存在量により,即座に地表面の分類が可能となる
アンモニアに富む氷,純粋な氷,炭素に富む砂丘など
この場所でサンプリングなどの詳細分析を行うべきか,行うならどういうサンプルが欲しいかなどの決定に役立つ
DraGMet (Dragonfly Geophysics and Meteorology Package)
地学的・気象学的な観測を行うための低電力のセンサー一式
気圧計
大気圧を計測
COTS センサー
温度計
気温を計測
COTS センサー
熱風速計
風向・風速を計測
機体上流の風を計測するため,各ローター台に取り付けられる
近赤外計
湿度を計測
地球と異なり,タイタンではメタンの存在量で湿度が定義される
近赤外線の吸収差によって測定
電極
磁場を計測
特に内部海までの深さの推定に使える Schumann 共鳴に関連する交流磁場
地面の誘電率を計測
加熱温度センサー
地面の熱特性(空隙率,湿気など)を計測
地震計
地殻活動を計測
内部構造の推定につながる
ドリルによるサンプリングの振動を計測
レゴリスの特性評価ができる
DragonCam (Dragonfly Camera Suite)
様々なカメラ一式
飛行中や着陸時の前方・下方を撮影するカメラ
顕微鏡カメラ
表面物質を砂の粒子スケールまで拡大できる
パノラマカメラ
着陸後にその地点の周囲を詳細に調べられる
光学設計以外は火星着陸機と似たようなシステムである
Huygens のデータから,タイタンは暗いことが分かっている
LED 照明を搭載
夜間にもカラー画像が撮影できるようにするため
紫外線源を搭載
蛍光を介して特定の有機物(特に特に多環芳香族炭化水素)の検出を可能にするため
Engineering systems
その他,工学機器もサイエンスに使える
慣性計測装置 (Inertial Measurement Unit, IMU) によって,大気圏突入時の減速履歴から大気密度を推定したり,飛行データから風についての情報を得るなど
Dragonfly の飛行特性
タイタンの地表付近において,重力は $${1.35 \,\mathrm{m/s^2}}$$(地球の 1/7 倍),大気圧は $${1.47 \,\mathrm{bar}}$$(地球の 1.45 倍),気温は $${94 \,\mathrm{K}}$$ です。大気密度は $${5.4 \,\mathrm{kg/m^3}}$$(地球の 4.4 倍)と地球よりも高い一方で,温度が低いがゆえに粘性係数は $${6 \times 10^{-6} \,\mathrm{Pa \cdot s}}$$(地球の 1/3 倍)と低いため,地球表面に比べてレイノルズ数は 10 倍以上となります。そのため Dragonfly の空力特性は地上のはるかに大きなシステムの特性に類似しており,実際風力発電のブレードを参考に設計しているとのこと。また,気温が低いため音速も $${194 \,\mathrm{m/s}}$$(地球の 0.56 倍)と遅く,同じ回転速度でも地上よりプロペラの先端マッハ数が大きくなってしまいます。先端マッハ数は $${1}$$ に近づくほど空力特性が悪くなりますが,実際のところ $${0.4}$$ であれば設計上問題なく,これが制約となります。
初期開発では,様々な地形を探査できるように,一度の飛行で火星ローバーが 10 年かけて移動する距離($${40 \,\mathrm{km}}$$ 程度)よりも飛べるように設計されました。$${420 \,\mathrm{kg}}$$ の機体を考え飛行特性の分析を行ったところ,maximum-range speed(飛行距離/消費燃料が最大となる速度)は $${10 \,\mathrm{m/s}}$$ 程度であり,$${100 \,\mathrm{Wh/kg}}$$ のバッテリー $${30 \,\mathrm{kg}}$$ で,マージンを考慮しなければ 2 時間,$${60 \,\mathrm{km}}$$ 飛べる計算となりました。空気抵抗を減らすため,飛行中はハイゲインアンテナ (HGA) は畳んでおくことになります。
水平方向のみならず鉛直方向の移動も科学的価値があり,特に大気境界層のプロファイリングは興味深く,これには高度 $${500 \,\mathrm{m}}$$ から $${4 \,\mathrm{km}}$$ まで上昇する必要があります。垂直上昇は可能ですが,垂直下降はボルテックス・リング状態(ヘリコプターなどの回転翼機に発生する空気力学的な現象で揚力の大幅な低下を招く)による不安定化を避けるため着陸時のような非常に低速な場合を除いて不可能であり,低速な下降もエネルギー効率の悪さから非現実的です。そのため,プロファイリングは水平移動の際の上昇中または下降中に行えばよく(経路角は $${4 \,^{\circ}}$$ ),また局所的なプロファイリングが求められる場合は螺旋飛行を行えばこれが実現できます。
global circulation models (GCMs) を用いた推測によるとタイタンの地表付近の風速は最大でも $${1}$$ ~ $${2 \,\mathrm{m/s}}$$ 程度である(Huygens の観測結果におよそ一致している)ため,$${10 \,\mathrm{m/s}}$$ 以上の飛行においては風は大きな問題とはなりません。
Dragonfly のミッションプロファイル
2030 年代中頃に到着し地球と直接通信をするためには低緯度地域に着陸する必要があり,これは Huygens と似たような場所・季節であるため当時の観測データが使えます。加えて,赤道付近の "sand seas" は科学的興味,着陸安全性のいずれにおいても優れています。タイタンの砂丘は概して緩やかであり,さらに従来のロケット推進を用いたランダーとは異なり, Dragonfly は着陸時に自由に場所を選び戻ることもできます。

従来の惑星・月着陸機と異なり,パラシュートの切り離し後何 km も低空飛行することができる。
この間に着陸候補地の観測をし,安全な着陸地点を探し出す。
最初の着陸以降は,次の観測地に向けて移動します。その際,地形が十分なだらかであれば最大航行距離だけ移動してもよいですが,次の着陸地をその 1/3 以下の距離とするとより安全です。下図のように,現在地 A を出発した後,まずは着陸候補地 B までの 2 倍程度先まで高度 $${500 \,\mathrm{m}}$$ ほどで低空飛行しながら着陸候補地 B を通り過ぎ,その間に候補地 B やさらにその次の候補地 C の様子を観測し,安全を確認してから戻って B に着陸します。仮に B の上空通過時に B が安全でないと判断された場合,その時点で折り返して A まで戻ることができます(はじめから最大航行距離だけ移動するつもりでいると A に戻ることができません)。
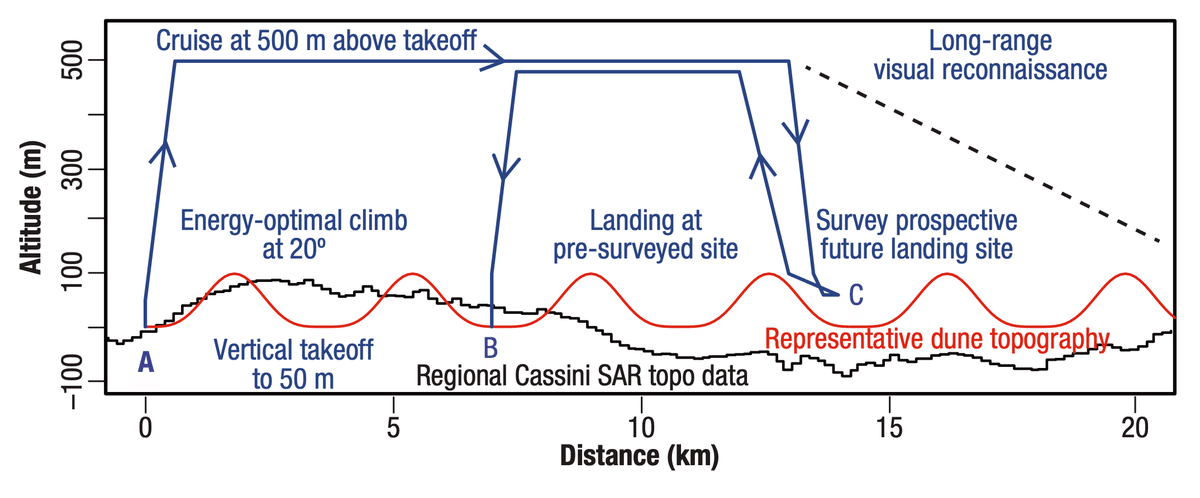
この手法により着陸地点は常に事前に観測データに基づいて安全が裏付けられている状態となる。
着陸後は HGA を展開し,飛行特性,着陸地付近の画像などから順にダウンリンクを開始します。飛行中のデータのダウンリンクが終わったら着陸地周辺の観測を行い,適宜ダウンリンクします。着陸地点が科学的に興味深ければ長期間滞在してサンプリングなどの観測を行います。その間にも数 m ほど移動して別の位置のサンプル採取をしたり別の方向の撮像をしたりすることもできます。
MMRTG の出力の低下はなだらかで,主要な消耗部品もないため,ミッション期間に大きな制約はありません。数年かそれ以上のミッションで訪れる何箇所もの着陸地点で,多様な科学観測を行うことで,大きな科学成果が期待できます。
コメント
以前の記事(MSR の旧コンセプト,MSR の新コンセプト)でも述べましたが,飛行探査は惑星探査を大きく変えるポテンシャルを秘めており,革命とも言えます。
惑星探査の手法は大きく分けて 4 つ,フライバイ(目標天体の側を通り過ぎる),オービター(目標天体を周回する),ランダー(目標天体に着陸する),サンプルリターン(目標天体の資料を地球に持ち帰る)に分類されます。段々と高度で複雑になる一方でより大きな科学的成果が期待できます。ランダーは直接的に天体にアクセスできるという点でオービターに勝っていた一方,全球的に観測できるオービターと異なり着陸地点の周りしか観測できませんでした。
そこで,ランダーの中でも移動手段を持ったランダー,ローバーが誕生しました(ランダーは広義にはローバーを含みますが狭義には移動手段のない着陸機を指します)。先述の別記事で触れたように,最初のローバーは 25 年前,火星の Sojourner でした。ローバーは移動手段を獲得したことで様々な地点の観測ができるようになった一方で,様々といっても全球的なスケールで見たら極々一部に留まっていることには変わりありませんし,急な傾斜などローバーでは行くことのできない場所も多く存在します。
そこで飛行探査が着目されます。ローバーよりも速く遠くへ行け,急斜面も崖も関係ありません。一方で,もちろん大気がないと飛べませんし,ローバーと異なり落ちたらすぐに壊れうるという大きな危険も伴います。
このような制約やリスクを加味してもなお,飛行探査には大きく期待できます。例えば下図のような,火星表面に空いた穴の奥に広がる地下空洞にはかつて,あるいは現在も生命がいた/いる可能性が指摘されていますが,このような場所にはローバーでは行くことができません。クレーンのようなもので底に降りるといった探査手法も考えられてはいますが,ドローンのようなものであれば難なく内部の探査ができてしまいます。

月や火星の他の地点で見つかっている穴と同様,溶岩チューブによって形成され,
内部には地下空洞が広がっていると考えられている。
タイタンは大気に恵まれた天体であり,飛行探査に適しています。地球のように山があり川が流れている景色を空から眺めながら飛んでいる Dragonfly を想像するだけでもわくわくします。タイタン到達はまだ 10 年以上先ですが,期待が高まります!