Studuino:bit ロボットカー 15 (04/15)

「mochizukiのICT活用ワンポイント 7867回」
毎日noteを再開しました。今月のテーマはロボットカーです。
・006センサーで停止 続き
1秒待つところを
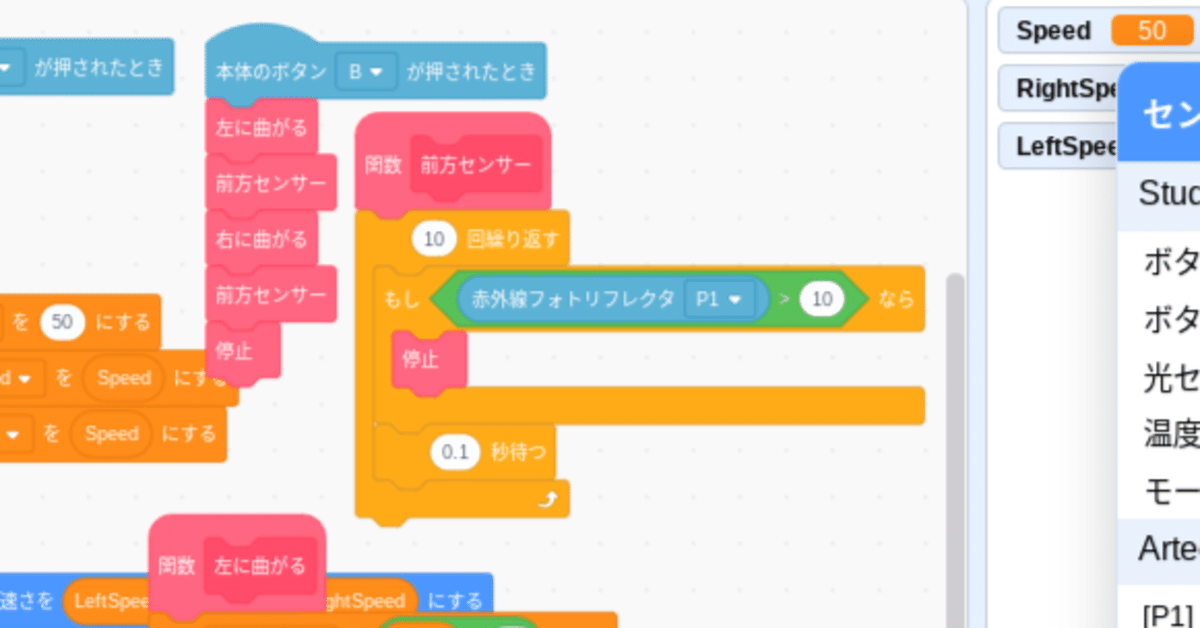
関数「前方センサー」に置き換えています。
何をする関数かというと、
・前方につけた赤外線フォトリフレクタ(距離を測るセンサー)の値が10をこえたら(障害物に接近したら)
→関数「停止」にとばす・・・停止する。
のですが、
0.1秒ごとにセンサーの値をチェックしています。
それを10回繰り返す、つまり、
1秒の間に10回停止するチャンスがあるわけですから、
前回話題にした、「1秒」の間に
介入しているということになりますね。
続きは次回。