SR6 DIYキットを作る2

OSR2+やSR6が何かを知ってる人に向けて残す
最初にして一番の山場らしい電子工作
組み立てるだけ
tempestのマニュアルでは基盤を切り出してサイズを整えて
ピンをハンダ付けする工程なのだが
組み立て済みの専用基板が付属している
配線もターミナルブロックに差し込んでドライバーで締め付けるだけ
電源とスイッチの結線のみ閉端接続子を圧着する必要があったが
結線できればブロック端子でもギボシ端子でもなんでもいいだろう
マニュアルをしっかりと確認して配線するだけ
はんだごてすら不要だった
本体のトレーにスイッチとACコネクタを固定して
EPS32基板とサーボ給電用の基板をセットしてねじ止めするだけ

サーボの端子を分割する
サーボの3端子、+、-、信号から信号だけを抜き取って1ピンずつに分けるところだがEPS32基板の使用する端子が隣り合っているので
QIコネクターの4ピンと3ピンに信号をまとめてしまうと楽である
1ピンにすると指し間違えや抜けの原因になる
3ピンのQIコネクターがポロポロと外れることは無い
電源も同じくサーボ6個分の12ピンQIコネクターにすると非常に安定して差し込める
しっかりとマニュアルと現物を照らし合わせてQIコネクターを差し込むだけなので特に難しい点はない
ファームウェアを書き込む
今のところEPS32基板はまっさらな状態なのでファームウェアを書き込む必要がある
公式ではArduinoIDEを使ってプログラムを書き込むという
マイコンを触った事のある人ならどうという事はない作業だが
知らない人にはなかなか面倒な作業になる
PCにwindowsをインストールするようなものだと言えば分かりやすいだろうか
ArduinoIDEを使ってtempestファームを使っても良いが
この後のサーボ調整が非常に時間がかかる
書き込むたびにプログラムをチェックしてコンパイルするためだ
なのでサードパーティのファームウェアをインストールすると非常に捗る
TCode ESP32
Khrull氏が作ったファームウェアで氏のpatreonで公開されている
セットアップは付属のPDFを自動翻訳して画像をみればできるレベル
利点は多い
tempestファームは読んでどういう仕組みで動いているのかを理解するに留めて、TCode ESP32を使うべき
サーボの調整
サーボを固定する
本体のサーボフレームにハメてねじ止めするだけだが
キッチリとワッシャーをかませて、対角締めをする
この時点で左右のサーボフレームをねじ止めして、ベースに固定して良い
この時点で前述のサーボ配線の処理をして配線をインシュロックで固定
サーボの位置調整
サーボとESP32、電源をつなぐとサーボが自動的にホーム位置に戻る
その状態でサーボホーンを仮止めして、いったん電源をはずしてから
しっかりと本締めを行う、その後アームも固定して
マニュアルどおり、アームの位置調整を行う
TCode ESP32の設定画面で数値を調整して全てのアーム穴が平行になるように調整していく
TCode ESP32は数値を変更すると数秒で設定を反映してくれるが
tempestファームでは数十秒かけてArduinoIDEで更新するため
非常に時間がかかる
きっちりとサーボホーンの位置決めが出来ていればベースになる1500を基準に1400~1600の間で全てのアームを平行にできるずだ
この工程が一番時間がかかったがTCode ESP32を使って慣れればサクッと終わるだろう
その他の組み立て
リンク
マニュアルに沿ってロッドエンドベアリングとナットを調整していく
ロッドエンドベアリングにナットを通して、全てのナットを同じ位置に
するのが早いだろうそこからアームにねじ込んでいくが
左右のベアリング穴の中心同士の距離が175mm
17.5㎝になるように位置調整していくアームの端からベアリングの端まで25mmで統一すると良い
難しくない
本体
コードの取り回しに気を付けて丁寧に納めていけばいいが
適当にコードをぶち込んでも余裕があるつくりになっているので
ねじ止めの際にコードをかまないようにするたけで良い
twistの配線をするのを忘れずに
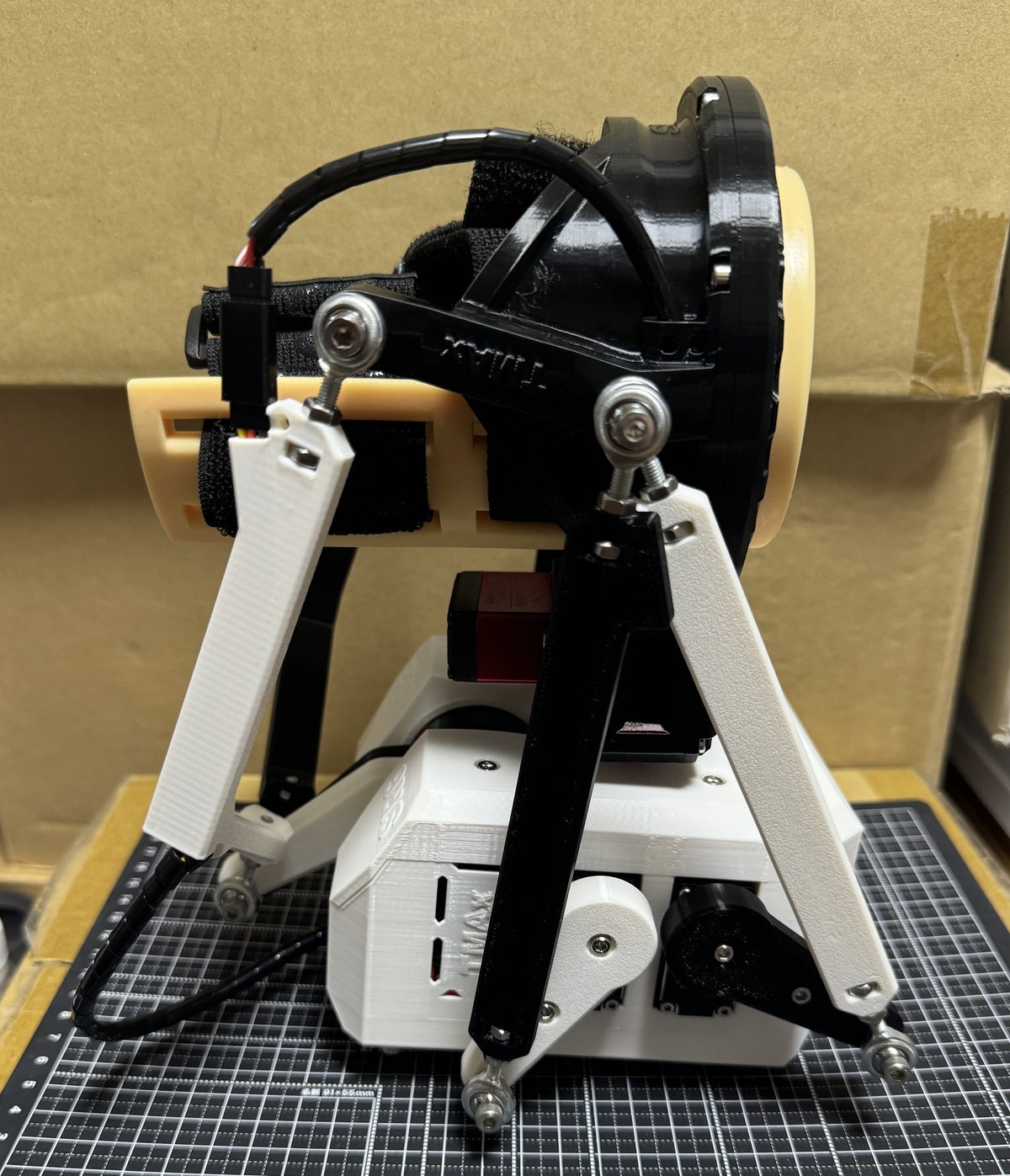
本体とリンクとツイストを繋ぐ
マニュアルが優秀過ぎる
スペーサーとベアリングにボルトを通して
ツイストに固定してから本体にボルトで固定するだけ
余分な穴もないので間違えが起きない
ツイスト用レシーバーを作る
付属していれば作る必要がない
色々な人が作ったstlが手に入るので印刷するなり買うなりでいいが
筆者愛用のハトプラ KUU-SOU ULTRASOFT onepointを安定して固定するために3Dモデリングで作った

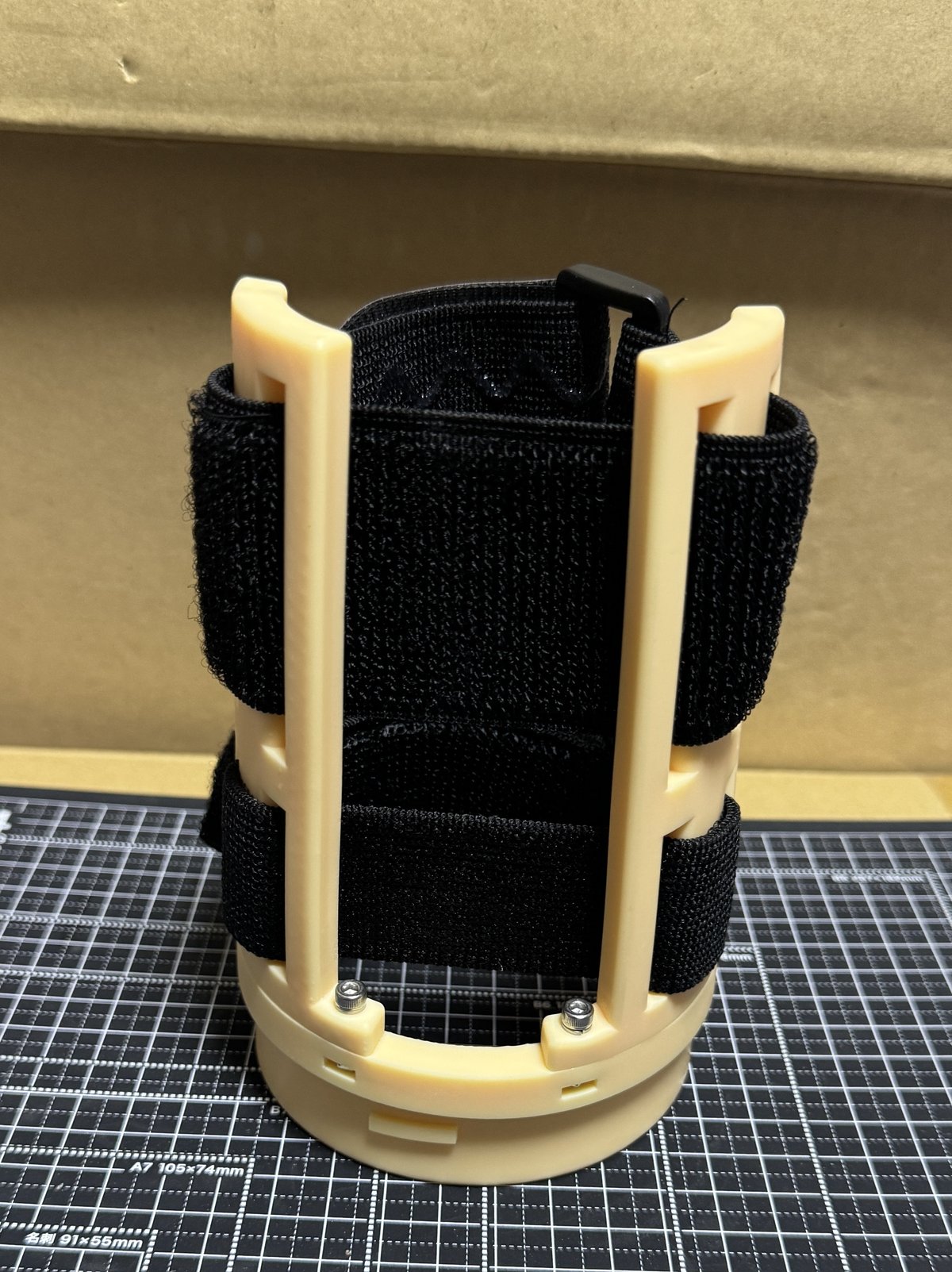
内径8㎝でKUU-SOU ULTRASOFTも余裕で入る
支柱を2本にして安定させると共に表面にはおさえを配置せずに
KUU-SOU ULTRASOFTのふわとろ感を損なわないような構造にした
3Dプリントのレジン製だが強度は十分
完成
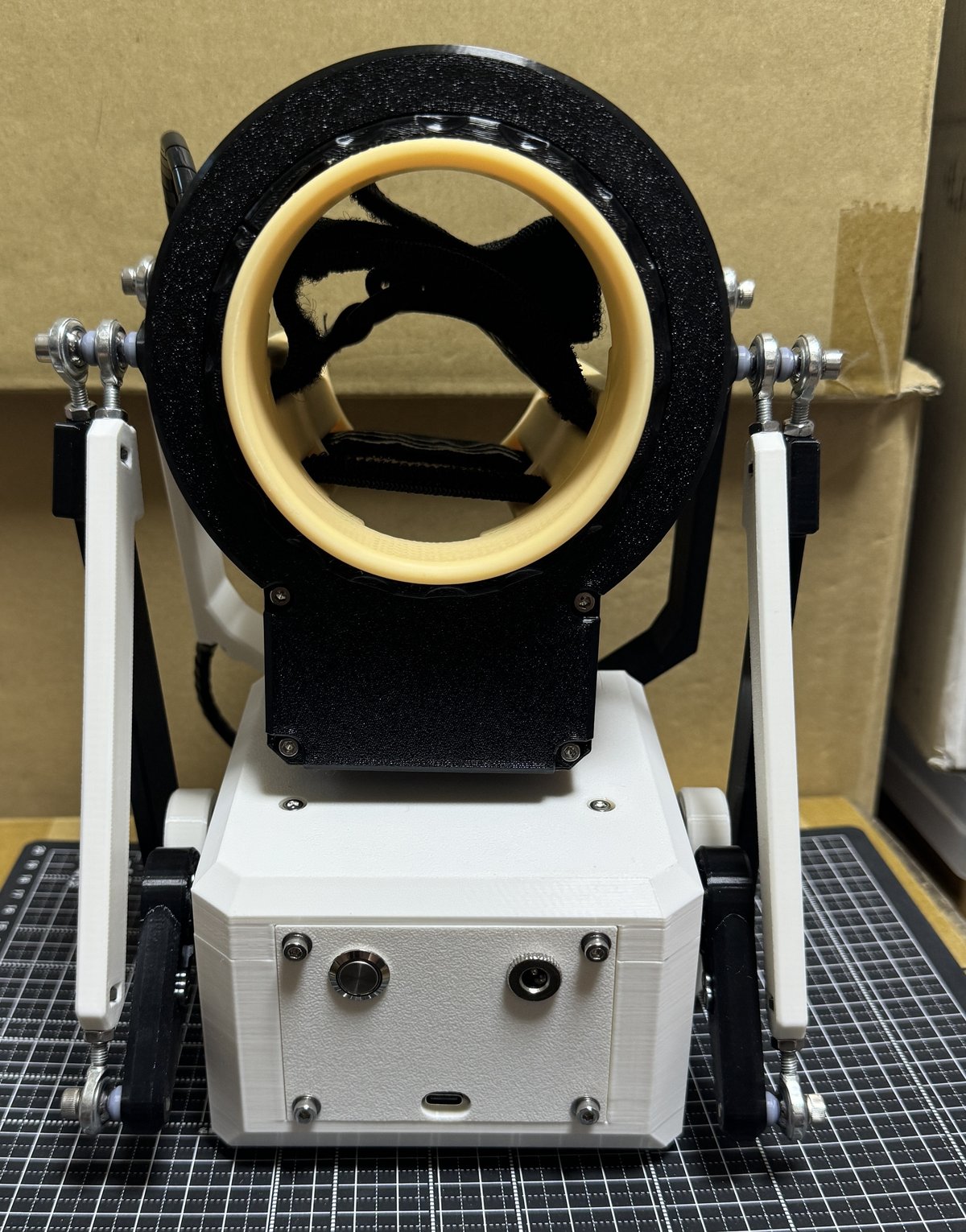

特に難しいとか悩む点もなく完成した
tempestのSR6マニュアルを自動翻訳して読んで理解できる人ならば自作は超おオススメ出来る
固定に関してはAmazonでVESA対応のモニターアームを買えば解決する
¥2,000台の安いので十分機能を果たす
稼働環境
PCとUSB有線接続
quest2を使いsteamVRとWhirlygigで動画再生
MultiFunPlayerでSR6に出力させている
VaMとの連動もはsteamVRを介さずに直接VRモードを起動する事で
グラボのスペック不足をなんとか補っているの買い替えたい
これが世界最先端のオナホ使用環境である(キリッ