
大学院修士1年, 原田悠哉さん(飯塚研究室所属)が日本機械学会関東学生会第63回卒業研究発表講演会にてBest Presentation Awardを受賞

発表題目
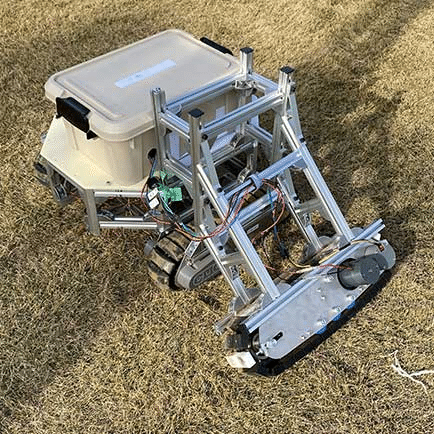
アウトリガーアームを搭載した小型軽量畦畔自動除草ロボットの開発
システム理工学専攻修士1年, 飯塚研究室所属(宇宙探査テラ-メカトロニクス研究室)の原田悠哉さんが日本機械学会関東学生会第63回卒業研究発表講演会にてBest Presentation Awardを受賞しました. 発表者が多くいる中での受賞, 本当におめでとうございます. 原田さんの行った研究について簡単に説明いたします.
研究目的
除草ロボットの課題として斜面横断走行時に横滑りしてしまうという問題があります。本研究では、方位角の変化と横滑りを抑制することができる小型軽量畦畔除草ロボットを提案することを目的としました。
研究内容
除草ロボットの側面に「アウトリガーアーム」と名付けた、45°に傾けたアームの先にクローラを搭載することで横滑りを抑制するという手法を提案し、その方位角変化および横滑りの抑制効果を検証しました。その結果、クローラ型アウトリガーアームを搭載することで、横滑り抑制が可能であることが確認されました。また、本体とクローラ型アウトリガーアームに速度差をつけることで方位角の変化を低減されることも同時に確認することができました。
今後の展望
さらに大きな傾斜度の斜面上での検証とアウトリガーアームの角度による横滑り抑制効果の差の検証を行います。
また、実際の農業従事者を補助できるような除草ロボットの自動化を行いたいと考えています。

高校生のみなさんへ
大学に入り, そして研究室配属後(3年生後期から), このような学会で発表する機会があります. そして, 原田さんのように表彰される可能性も十分にあります. 研究を楽しみながら, 一生懸命行ってきた成果でもあり, あるいは時には苦労することも多い中で, このような成果がでることがあります. 大学って想像しているところよりも!?いろいろなことが経験できます!!ぜひ一緒に研究しましょう!
(執筆:飯塚浩二郎)
芝浦工業大学広報記事:
https://www.shibaura-it.ac.jp/headline/award/20240624_7070_001.html