
でじたる箱庭計画 試行錯誤(カメラアライメントその後)

色々と試行錯誤をしてきましたが、カメラアライメント関連の現時点(2025・2)でのまとめをしておきたいと思います。
結論
その後、試行錯誤を積み重ねてた結果、nerfstudioでHLOC(HLOC+COLMAP)が、処理時間がかかるものの、これまでのところ、99%以上の画像のアライメントが取れて安定して実用的であると判断しました。前回試行錯誤したHLOCとGLOMAPとの組み合わせは処理速度的には精度に問題のあるケースが多く実用出来ではないと判断しました。
現時点で試行錯誤している2000~3000画像であれば一晩でアライメントが完了するので、新たな技術が見つかるまでは素直にnerfstudioでHLOC(HLOC+COLMAP)を使っていきます。
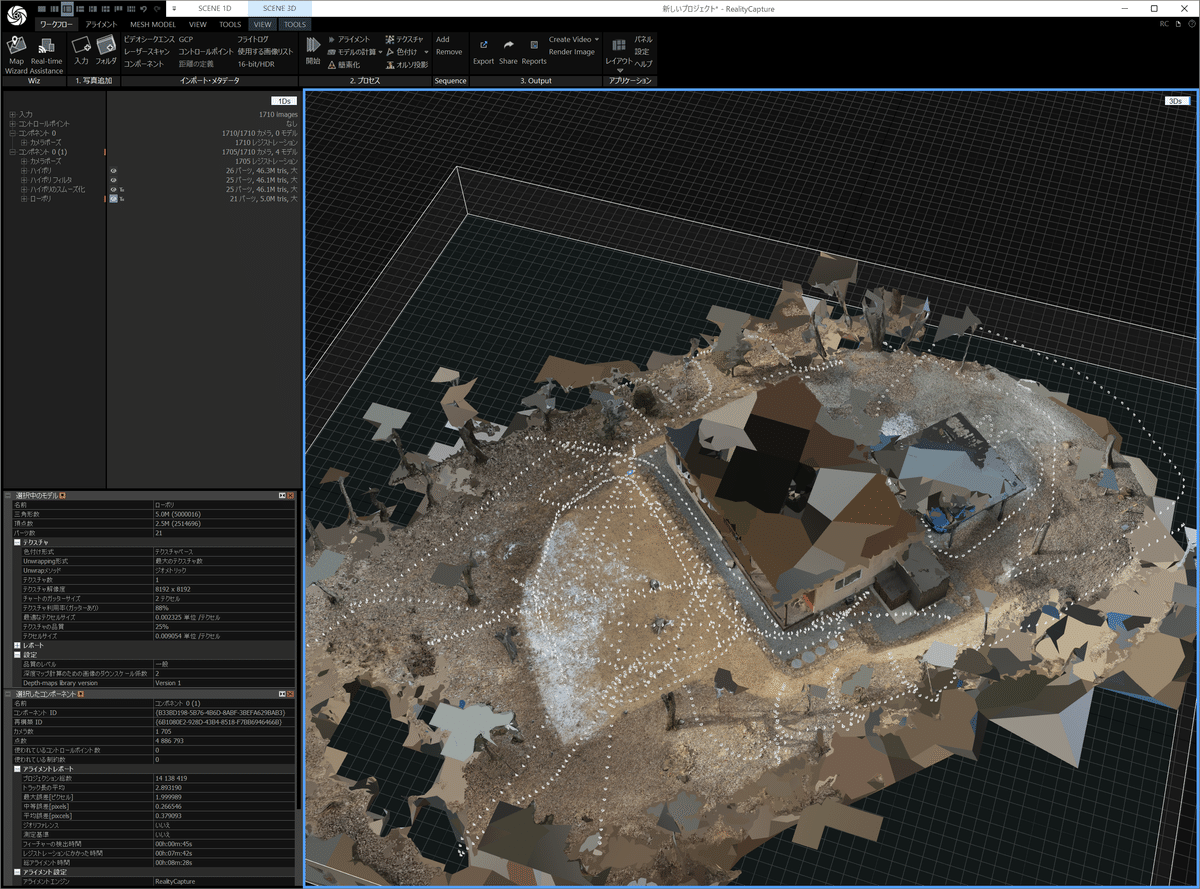
RealtyCaptureはでしたる箱庭計画で想定しているご近所の景色をモデル化するのには出来さないようで、多くのコンポーネントに分割されれしますます。これをマージする手間を考えると実用的でhないと考えています。
また、RealtyCaptureにnerfstudioのHLOC(HLOC+COLMAP)のアライメントの結果を取り込んでメッシュモデルを作成する必要があったので、ついでに再アライメントして精度が改善するかも試してみましたが、あまり大きな差異はないようです。メッシュモデルはUNITYで3DGSと組み合わせてウォークスルーできるアプリを試作するのに使いました。UNITYでの3DGSについて後日記事にしたみたいと思います。


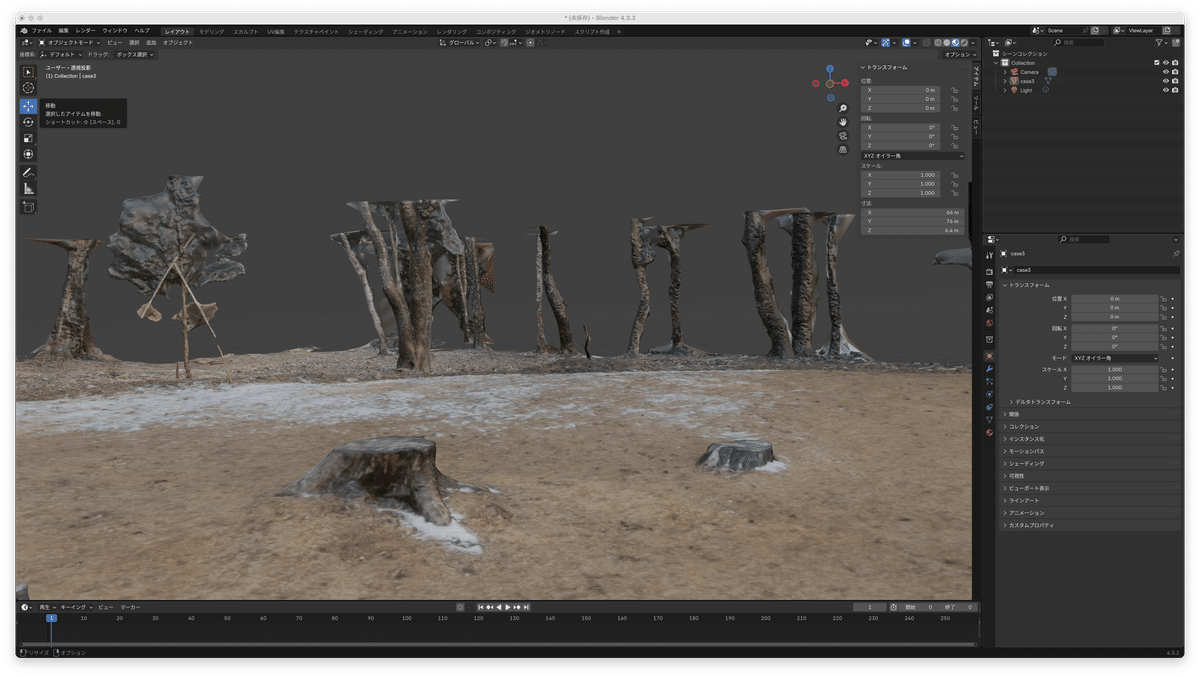

上記の試行錯誤の例では遠景を含めた全体では3DGSのほうが綺麗で、建物の陰などの明暗差の大きい部分などでがRealityCaptureで作成したモデルの方が良好だったので、今後、3DGSとメッシュデータの使い分けについて今後の検討としたいと思います。
今日はここまで、
次回は360°カメラの画質について試行錯誤してみたいと思います。