Isaac LabとReinforcement Learning Researcher Kitを使用したSpotロボットの強化学習

タイトル
「『Isaac LabとReinforcement Learning Researcher Kitを使用したSpotロボットの強化学習』について説明します。この革新的な技術がどのように四足歩行ロボットの開発を変革しているかをご紹介します。」
課題
「まず、四足歩行ロボットの開発における主な課題を見ていきましょう。複雑な動きの制御、実世界での危険で時間のかかる学習プロセス、そしてシミュレーションと現実のギャップ。これらの課題が、効果的なロボット開発を妨げてきました。」
解決策
「これらの課題に対する解決策として、Boston DynamicsとNVIDIA AI Instituteが開発した強化学習研究者キットを紹介します。高忠実度シミュレーター、高性能AIコンピューター、そして精密な関節制御が可能なSpotロボット。これらの要素が、革新的な開発環境を実現しています。

キットの内容
「強化学習研究者キットの主要コンポーネントを詳しく見ていきましょう。Spotのジョイント制御API、NVIDIA Jetson AGX Orin用のマウント、そしてIsaac LabのSpot用シミュレーション環境。これらが一体となって、効率的な学習と実装を可能にします。」

Isaac Labの特徴
「Isaac Labの特徴を説明します。NVIDIA Isaac Simプラットフォームをベースに、ロボット学習に最適化されています。GPUを活用した高精度な物理シミュレーションと領域ランダム化機能により、現実世界との高い互換性を実現しています。」
トレーニングプロセス
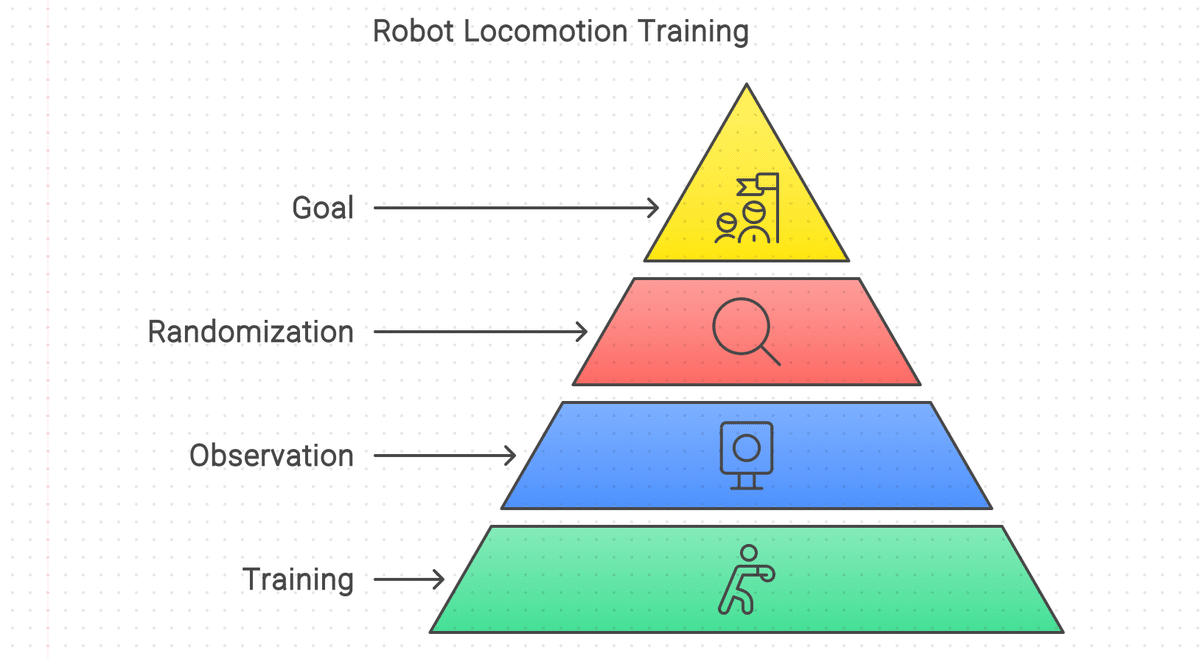
「トレーニングプロセスの詳細です。Isaac Lab環境でロコモーションポリシーをトレーニングします。ロボットの状態、速度コマンド、過去の行動を観測し、様々なパラメータをランダム化することで、ロバストなポリシーを学習します。最終的な目標は、平坦地形での安定した歩行と目標速度の追跡です。」
ネットワークとアルゴリズム
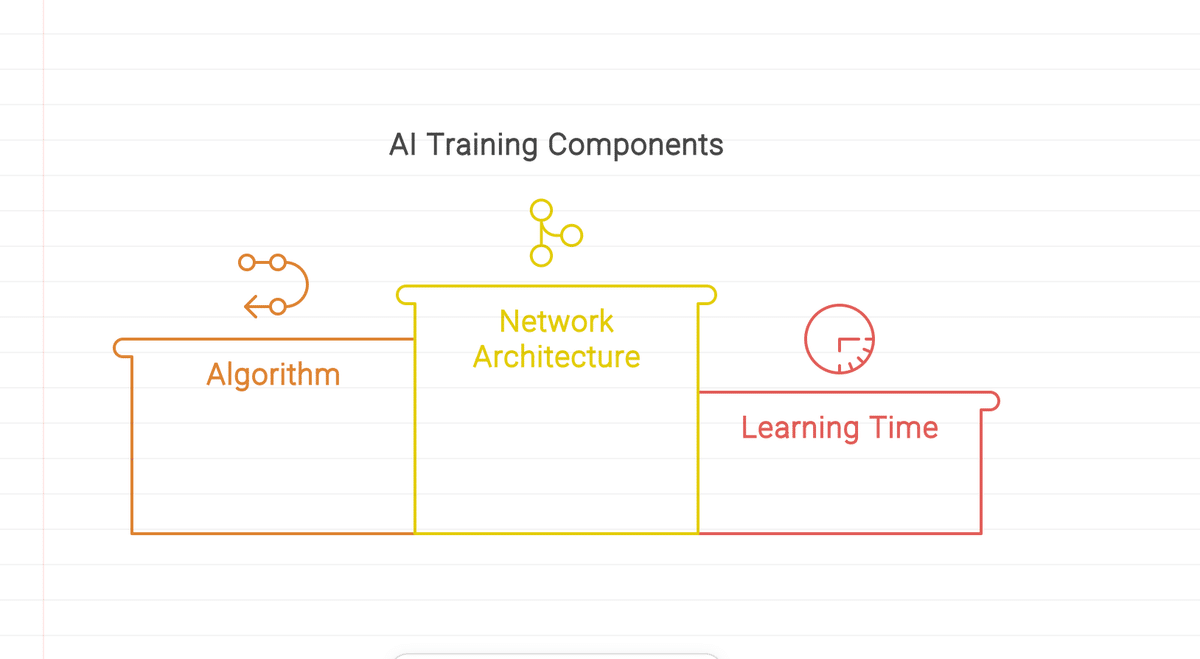
「使用するネットワークとアルゴリズムについて説明します。3層のMLPを採用し、PPOアルゴリズムを使用しています。NVIDIA RTX 4090 GPUを使用することで、約4時間という短時間でトレーニングを完了できます。」
実機への展開
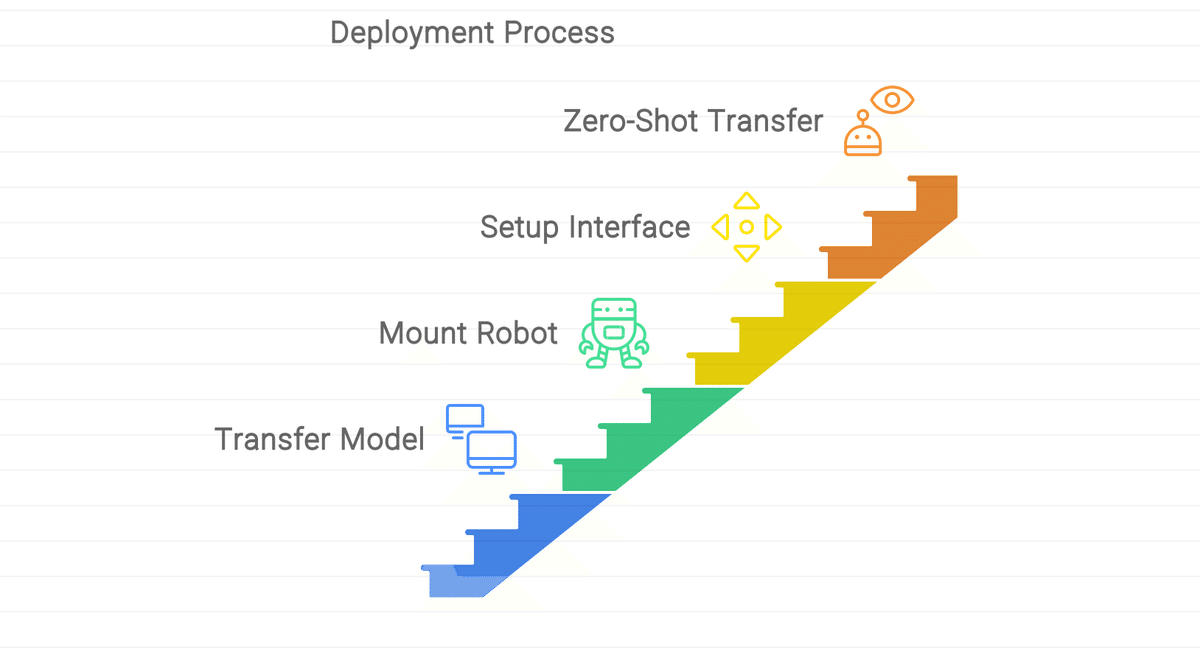
「シミュレーションで学習したモデルを実機に展開する流れを説明します。学習済みモデルをJetson Orinに転送し、Spotロボットにマウントします。ゲームパッドによる操作インターフェースを設定することで、実世界でのゼロショット転移を実現します。」
結果
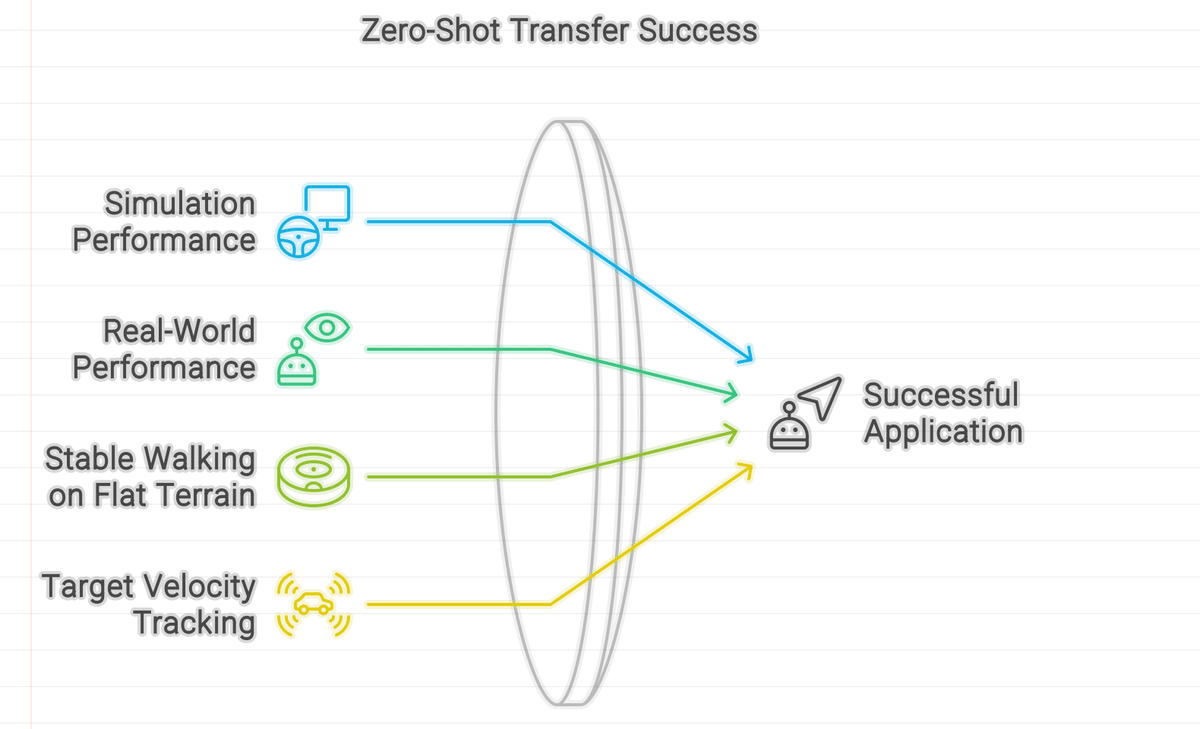
「実際の結果をご覧ください。シミュレーションと実機で驚くほど類似したパフォーマンスを達成しました。Spotは平坦地形で安定して歩行し、目標のx, y, yaw速度に正確に従うことができます。」
今後の展開
「この技術の今後の可能性について説明します。研究者は独自のカスタムタスクを作成したり、新しい報酬関数やドメインランダム化を実装したりすることができます。さらに、この手法は他のロボットプラットフォームにも応用可能です。」
まとめ
「最後に、本日の内容をまとめます。Isaac LabとRL Researcher Kitの組み合わせにより、効率的な学習と実装が可能になりました。シミュレーションから実機へのスムーズな移行は、四足歩行ロボットの研究開発を大きく加速させるでしょう。」