[ロボ実験記録] ロボットアームDobot MG400を立ち上げる&衝突センサの確認

はじめに
40万円弱で購入できるロボットアームDobot MG400を立ち上げた際の記録です。
Dobot MG400とは?
20万円弱で購入できる研究教育用ロボットアームDobot magicianが人気です。
MG400は産業用途に特化した設計のようで、兄貴分といえる存在です。
主な特徴は以下の通り。
耐荷重が500gから750gに増加
最大リーチが320から440mmに増加
動きが俊敏
接触センサ付き
デモ動画が参考になります。
個人的に魅力を感じたのが、動作の高速性と接触センサです。
dobot magicianは、
動きがややもっさり
接触センサがないので、微妙な高さ調整が難しい
ことがやや気になっていました。値段はmagicianの二倍くらいしますが、化学・材料系の実験装置の多くは数百万ー数千万が相場なので、それに比べると誤差レベルかもしれません。
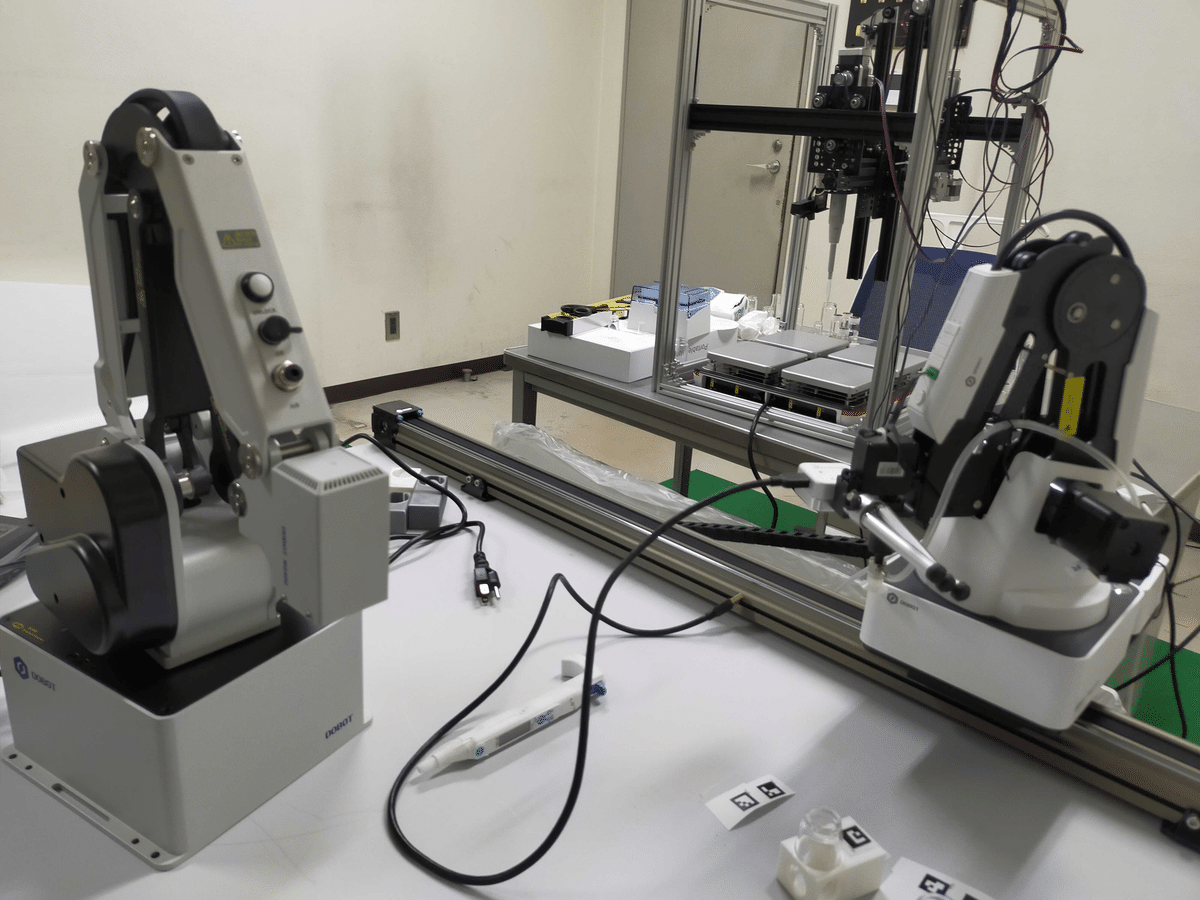
組み立て
電源を繋いで、LANケーブルを挿せばOKでした。
LANケーブルはちょっと煩わしいので、無線化したいところです(無線化できるようです)。
ソフトウェアの使用
とりあえず公式の制御ソフトウェアを使ってみます。
以下のURLからダウンロードできます(会員登録が必要)。
ipアドレスの設定
ここでちょっとつまづきました。
dobot mg400はlan経由で制御します。lanポートが2つありますが、まずはLAN1に接続します。
LAN1のipは192.168.1.6で固定されています。一般的なルーター(少なくとも筆者が用いているもの)は192.168.11.XにIPをふっていくので、マシンを検出できません。
そこで、PC側のipを手動で変更します(例:192.168.1.10)。
この状態でソフトウェアを起動すると、うまくMG400を検出できました。
ただし、ipが192.168.11.X系列でないので、PCからwebやルーターに繋げなくなります。
(192.168.1.Xと192.168.11.Xの見た目が似ていたので、なぜネットに繋げなくなるのか分からず、1時間ほど時間を浪費しました。救世主のChatGPT4が解決してくれました(こちら)。3.5では解決せず。)
そこで、MG400にipを振り直します。

マシンに接続後、設定画面を開いて、IP設定をしていきます。
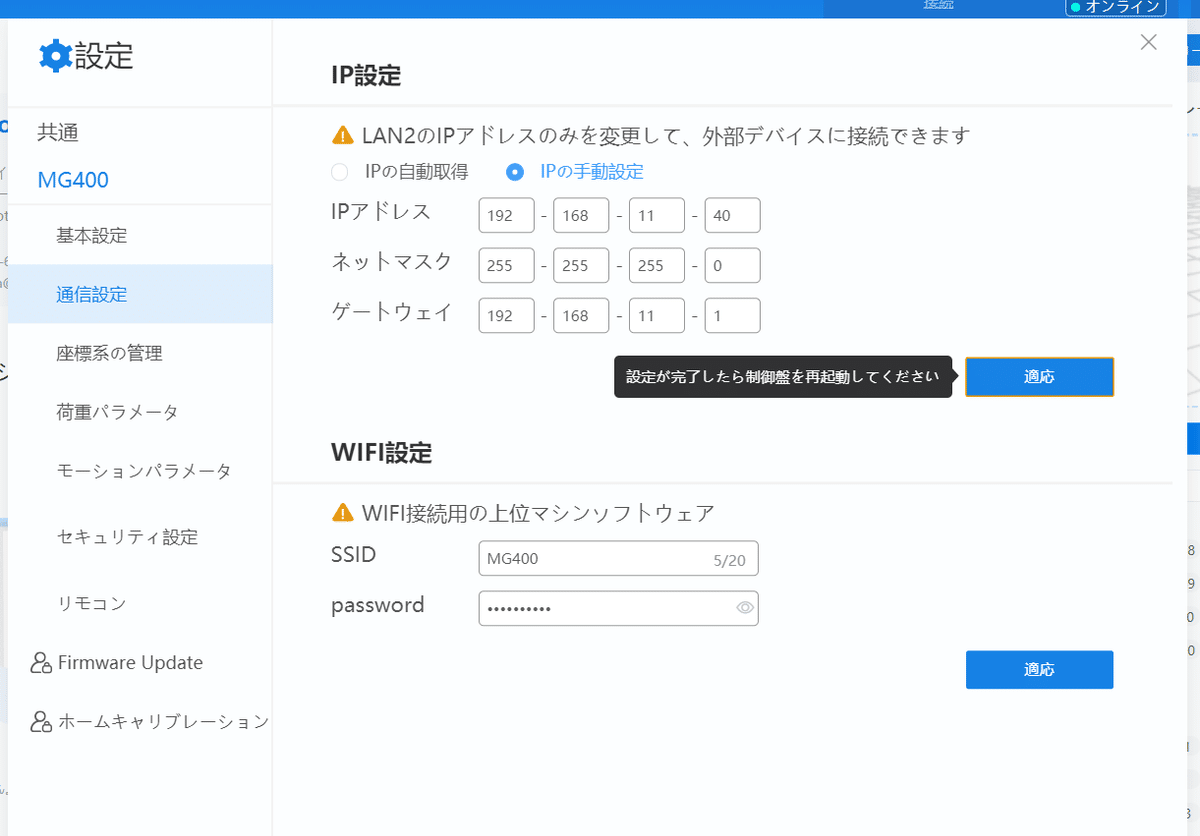
今回は、他のマシンとipが競合しないよう、192.168.11.40としました。
設定を反映後、dobotの再起動、ケーブルのLAN2への差し替え、PCのip設定の復元を行います。
最後に、「デバイス検索」の箇所で、設定したIP(192.168.11.40)を開けば設定完了です。

このあと、何をすべきかよくわからなくなったので、webサイトを参考にしました。
マシンの制御
マシンに接続後、enableボタンを押して制御できる状態にします。
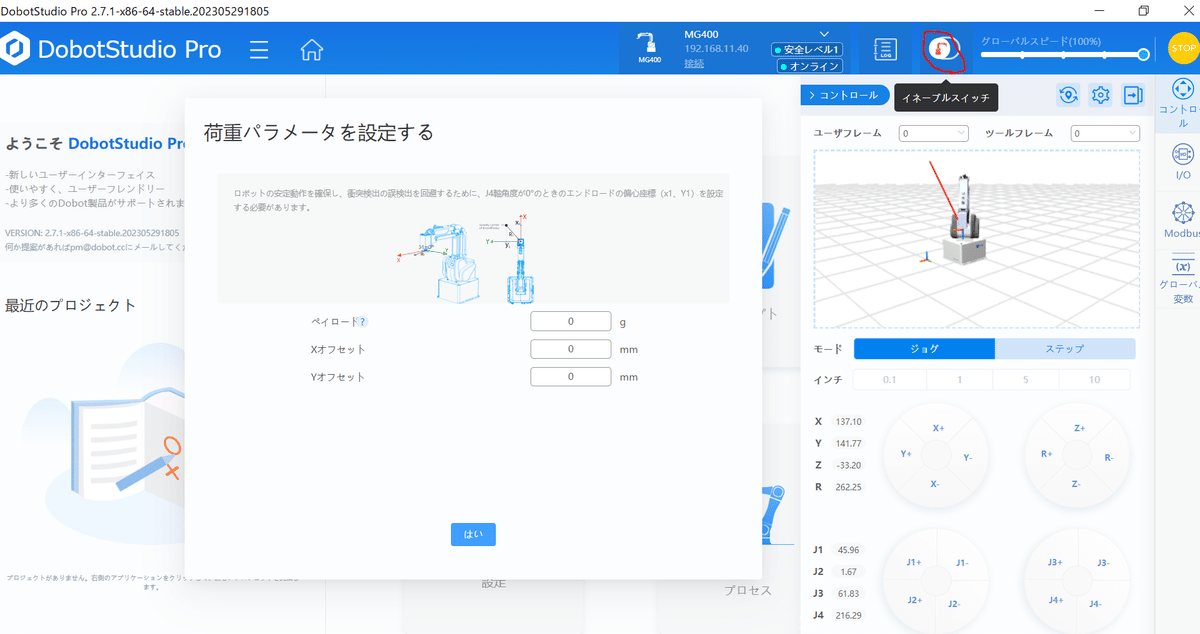
ペイロードは、エンドエフェクタの重量しょうか。とりあえず0にしました。
enableした後、とりあえず画面上のコントローラを使ってアームを動かせればOKです。
衝突検知機能の検証
dobot mg400に期待している機能の一つは、衝突検知機能です。
検知機能は、「セキュリティ」項目から選べました。とりあえず最大感度のレベル5にしてみます。

マシンの最大速度(設定上は200mm/s)で衝突させた結果はこちら。
最大感度でも、かなり力が加わってから止まる印象です。
dobot mg400の衝突センサ試験
— 畠山 歓 Kan Hatakeyama (@kanhatakeyama) December 15, 2023
車は急に止まれない、的なフレーズを彷彿とさせます pic.twitter.com/zf1Hao98KK
指と衝突させた場合はこちら。
指との接触 https://t.co/fBl3h7GFie pic.twitter.com/CiqS80QJtX
— 畠山 歓 Kan Hatakeyama (@kanhatakeyama) December 15, 2023
体感的には、ぐいっと強く押し込んだときにセンサが反応する印象でした。
個人的には、いわゆる触覚のような使い方、例えば「ピペットの先端をガラス瓶の底まで下ろす」のような作業で活躍での活躍を見込んでいました。
一方、「コツン」とぶつかる程度でセンサが反応するかは微妙で、「触覚」というよりは、公称通り、「衝突検知」というイメージでした。
触覚として使うにあたっては、アームの動作速度を遅くしたり、機構に可動域をもたせたりするなどの工夫が必要かもしれないと思いました。
今後は、Pythonでの制御を目指します。
追記: emergency stopについて
mg400には緊急停止ボタンがついています。
この状態で装置をenableしようとするとエラーが出てきます。
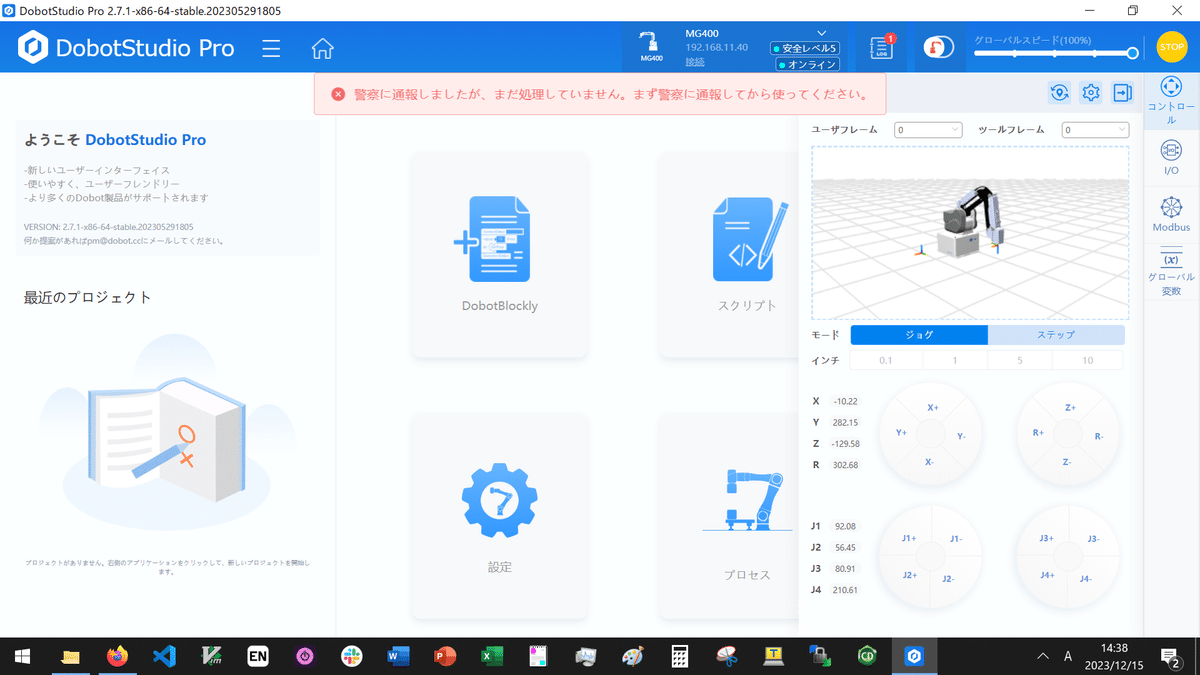
「警察に通報しました」と出てきますが、誤訳のようです。
ここは慌てず、ハードの方のボタンを通常に戻した上で、画面右上の「STOP」を押せば、通常モードに入ります。
警察には通報されていないと思います。堂々とつかいましょう。