[ロボ実験記録] ROS2の勉強4: 画像処理の勉強

概要
前回の記事では、ロボットアームで何かを掴む風の動作を実装しました
ただし、画像センサを付けていないので、目隠しでUFOキャッチャー遊びをするような状況です
USBカメラで物体を認識しつつ、掴むプログラムを作りたいです
今回はROS2で画像を処理する方法を学びます
例のごとく、こちらの書籍・レポジトリを参考にコードを書いていきます。
USBカメラの認識
カメラの動作確認
cv2ライブラリを使った、usbカメラとの接続(基礎の基礎)を実装します。
注意点として、dockerを立ち上げる前に、usbカメラを接続しておく必要があります。
import cv2
import time
cap=cv2.VideoCapture(0)
while True:
_,source=cap.read()
cv2.imshow("source",source)
gray=cv2.cvtColor(source,cv2.COLOR_RGB2GRAY)
_,result=cv2.threshold(gray,128,255,cv2.THRESH_BINARY)
cv2.imshow("result",result)
time.sleep(0.1)
cv2.waitKey(1)ROS2でのusbカメラモジュールの立ち上げと監視
ROS2には様々なパッケージがあり、その中に、usbカメラの画像を取得するモジュールが含まれているようです。
使い方は簡単で、以下のコマンドを実行するだけです。
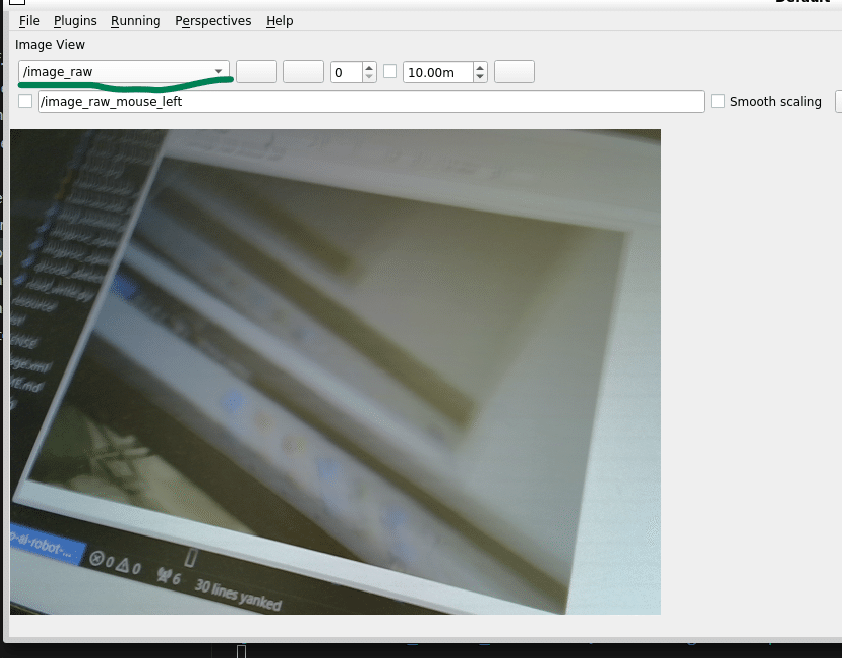
ros2 run usb_cam usb_cam_node_exe このプログラムは、観測した画像を"image_raw"として配信(publish)する機能があるようです。
配信されている画像を確認するには、rqtというモニタリングソフトなどを使うようです。
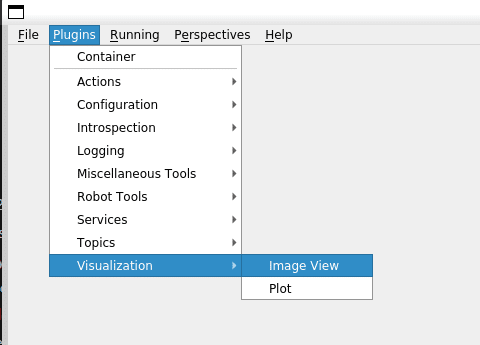
別のターミナルでrqtを立ち上げます。
rqt以下のようにクリックしていくことで、publishされている画像をモニタリングできます。
ROS2での画像データの受取
配信されている画像を受け取って処理するプログラムを作ります。
新たに、img_receiver.pyを以下のフォルダに作っておきます。
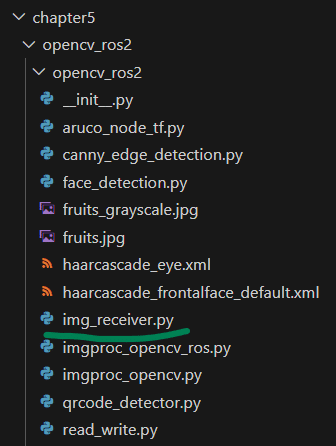
img_receiver.pyに中身を加えていきます。
import rclpy
from rclpy.node import Node
from rclpy.qos import qos_profile_sensor_data
from sensor_msgs.msg import Image
class ImgReceiver(Node):
def __init__(self):
super().__init__('img_receiver')
self.subscription = self.create_subscription(
Image,
'image_raw',
self.image_callback,
qos_profile_sensor_data)
def image_callback(self, data):
self.get_logger().info('got image!')
pass
def main():
rclpy.init()
img_receiver = ImgReceiver()
try:
rclpy.spin(img_receiver)
except KeyboardInterrupt:
pass
rclpy.shutdown()
コードの重要ポイントをgptに解説してもらいました。
create_subscription メソッド:
このメソッドは、特定のトピック(ここでは image_raw)に対するサブスクリプションを作成します。サブスクリプションは、そのトピックにメッセージが公開されるたびに通知を受け取るためのものです。
Image:
これはサブスクリプションが期待するメッセージの型を示しています。Image は、画像データを扱うための一般的なメッセージ型です。
'image_raw':
これはサブスクリプションが監視するトピックの名前です。このトピックに新しいメッセージが公開されるたびに、self.image_callback 関数が呼び出されます。
self.image_callback:
これはトピックに新しいメッセージが公開されたときに呼び出されるコールバック関数を指定します。この関数は、新しい Image メッセージを受け取って何らかの処理を行います。
qos_profile_sensor_data:
これはQuality of Service (QoS) プロファイルを示しています。QoSプロファイルは、メッセージ通信の品質や信頼性に関する設定を提供します。qos_profile_sensor_data は、センサーデータの伝送のための一般的なQoS設定を持つ、ROS 2で予め定義されているプロファイルの一つです
setup.pyにモジュールを追加します。
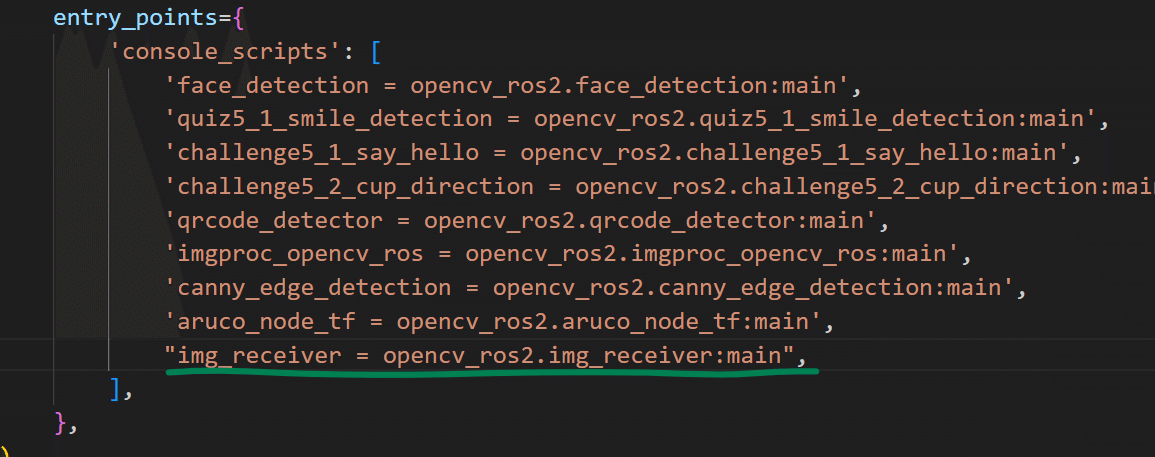
あとはbuildするだけです。
cd ~/airobot_ws/
colcon build --symlink-install実行
ros2 run opencv_ros2 img_receiver 実行すると、
[INFO] [1696527528.446362671] [img_receiver]: got image!
[INFO] [1696527528.545350359] [img_receiver]: got image!
[INFO] [1696527528.646337785] [img_receiver]: got image!
[INFO] [1696527528.745250521] [img_receiver]: got image!
[INFO] [1696527528.836038943] [img_receiver]: got image!
的なメッセージが連投されるはずです。
raw_imageをsubscriptionとして受け取って、image_callbackが呼び出されるようです。
受け取ったデータの処理
image_callbackの中にデータ処理コードを書き加えていきます。
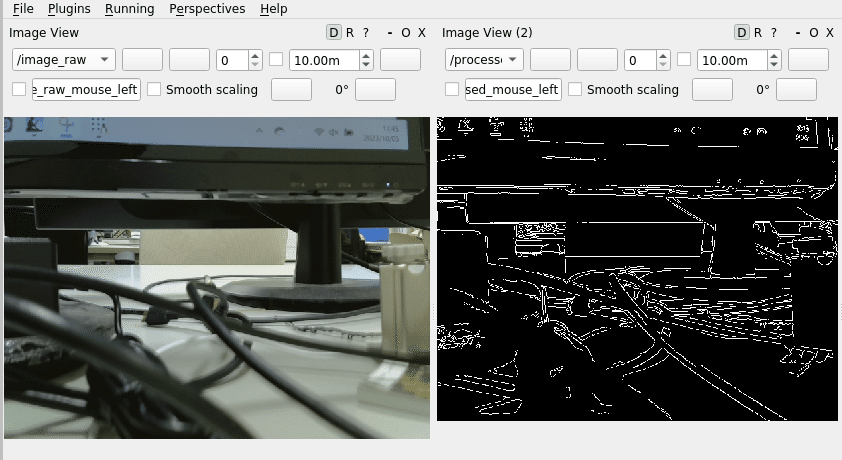
書籍では画像の2値化がなされていました。コピペでは芸がないので、輪郭を強調するコードにしてみます。
処理した画像はpublisherとして発信します。
import rclpy
from rclpy.node import Node
from rclpy.qos import qos_profile_sensor_data
from sensor_msgs.msg import Image
import cv2
from cv_bridge import CvBridge
class ImgReceiver(Node):
def __init__(self):
super().__init__('img_receiver')
self.br = CvBridge()
self.subscription = self.create_subscription(
Image,
'image_raw',
self.image_callback,
qos_profile_sensor_data)
self.publisher = self.create_publisher(
Image,
'processed', 10)
def image_callback(self, data):
self.get_logger().info('got image!')
source = self.br.imgmsg_to_cv2(data, 'bgr8')
edges = cv2.Canny(source, 50, 150) # 50と150は下限と上限の閾値
result_msg = self.br.cv2_to_imgmsg(edges, 'passthrough')
self.publisher.publish(result_msg)
self.get_logger().info('publish image!')
pass
def main():
rclpy.init()
img_receiver = ImgReceiver()
try:
rclpy.spin(img_receiver)
except KeyboardInterrupt:
pass
rclpy.shutdown()
実行結果は以下の通り。
無事に輪郭抽出できました。
深度カメラに対応したros2のモジュールもあるようです。
D435は以下のコマンドで動きました。
ただし筆者の環境では遅延が酷く、使い物にならない感じでした。何らかのトラブルが起きている印象です。
また、近距離用のD405ではエラーが出たので、他のプログラムが必要なようです。
ros2 launch realsense2_camera rs_launch.py align_depth.enable:=trueArucoマーカーの認識
詳細は次回以降に行う予定です。
配布されているdocker imageでエラーが出たので、修正しておきます。
(opencv, opencv-contribの競合が原因?)
pip uninstall opencv-python
pip uninstall opencv-contrib-python
pip install opencv-contrib-python==4.5.5.64opencvのバージョン指定も重要で、aruco周りはバージョンが0.1ずれるだけで、使えない関数が続出します。
以下のコマンドを実行すると、aruco マーカーを認識します。
ros2 run opencv_ros2 aruco_node_tf 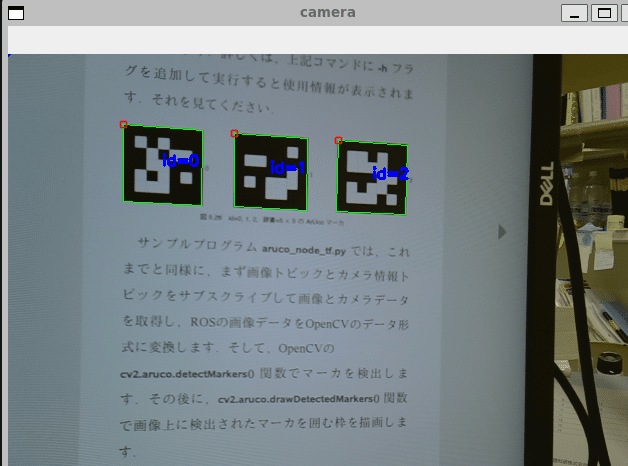
ここで取得した座標をアーム座標系とうまく接続すれば、カメラ認識による物体の把持が可能になるというストーリーのはずです。