
産業用途のネットワーク「フィールドバス」のご紹介 ~工場から宇宙まで!?~

本稿では、産業用途のネットワークであるフィールドバスをご紹介します。主に製造業界で利用する技術で、仕事で触れる機会がないとなかなか学ぶ機会もないでしょう。しかしネットワークを跨いでμsecオーダー(μsec: マイクロ秒)の同期制御を実現するこの技術領域は実に驚きに満ちています。
日本のモノづくりを支える技術者たちが向き合う世界の一端を一緒に覗いてみましょう。
前提知識
ネットワークに関する前提知識として以下を仮定します。
概要
追って触れるようにフィールドバスの応用範囲は年々広がっているのですが、フィールドバスの規格を生んだのはいわゆるFA(Factory Automation)の世界でした。
インダストリ4.0の構想に基づくスマートファクトリ化の潮流を受け自動化の進む昨今の工場ですが、なにを生産する工場かによって実際の自動化レベルは千差万別です。そうした中、例えば自動車の溶接工程などは特に自動化レベルの高い工程の一例となっています。以下はトヨタ自動車の溶接工程で、スポット溶接やレーザー溶接といった工法を操る器用なアーム型ロボットたちが所狭しと並ぶ様を見てとれます。
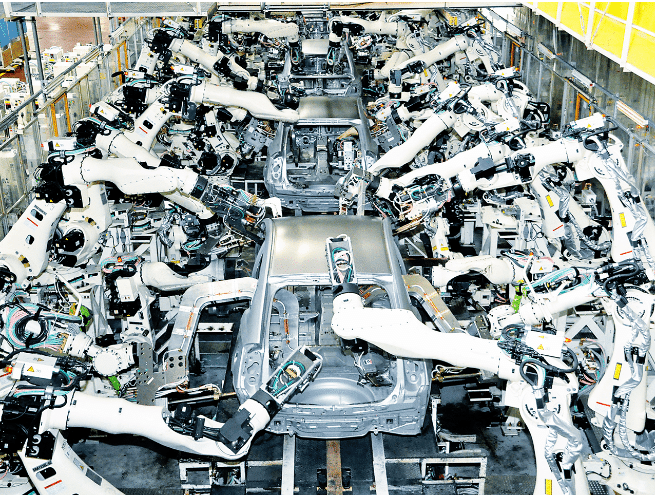
このロボットたちの挙動は間接等の可動部に組み込まれた複数のサーボモータで制御されており、それらのサーボモータを協調動作させる多軸制御(6軸ロボット、7軸ロボットなど、自由度はロボットにより様々)をモーションコントロールと呼びます。
さて、もしモーションコントロール時に、各サーボモータが意図したタイミングで動作しなかったらどうなるでしょう。本来意図した軌道とは異なる軌道にアームがズレ込んでしまう様子が想像できますね。軌道のズレが生じることで、溶接の対象となる車の車体(ワークアイテム)や隣のロボットにぶつかってしまっては大変です。このため、モーションコントロールにおいては、各サーボモータを意図したタイミングで同期的に制御することが重要になります。この同期制御を実現するのがフィールドバスなのです。
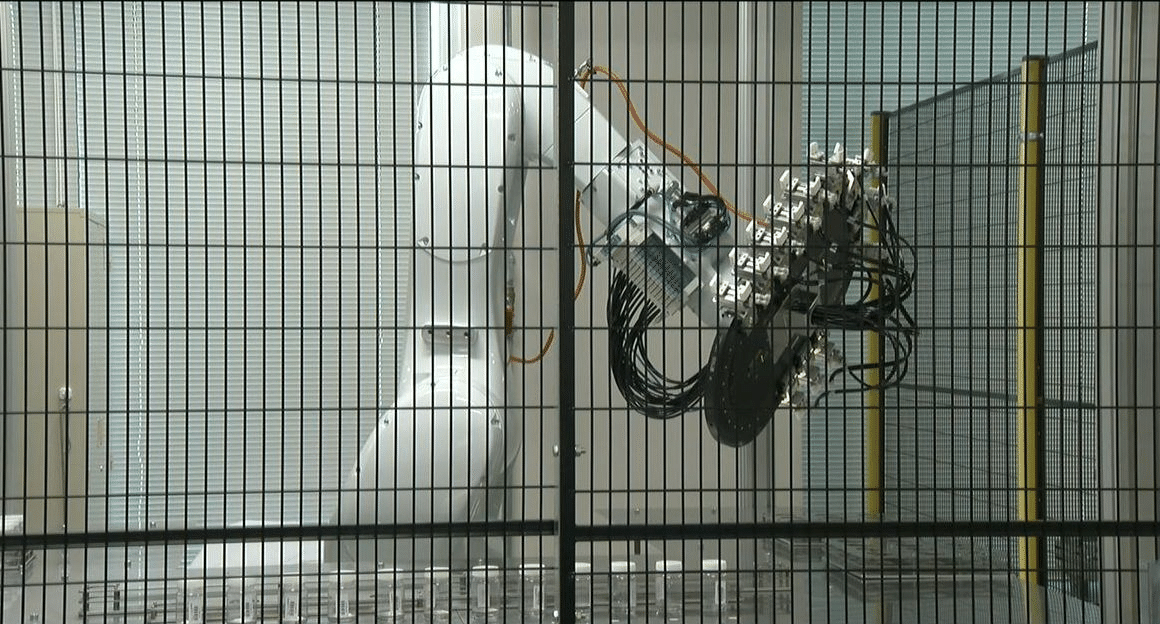
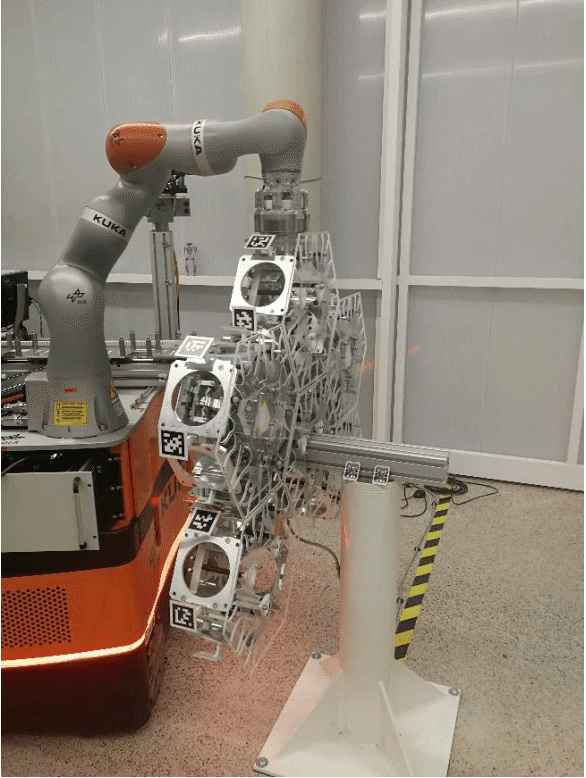
以上に例示したロボット単体のモーションコントロールの他にも、センサやアクチュエータを含む複数のFA機器を協調動作させる場合など、工場におけるフィールドバスの応用範囲は多岐に渡ります。以下の画像はデンソーウェーブによるロボットとハンドの同期制御のデモの様子です。典型的な応用の一例と言えるでしょう。
さて、背景をお話できたところでWikipediaからも引用しておきましょう。
A fieldbus is a member of a family of industrial digital communication networks[1] used for real-time distributed control. Fieldbus profiles are standardized by the International Electrotechnical Commission (IEC) as IEC 61784/61158.
A complex automated industrial system is typically structured in hierarchical levels as a distributed control system (DCS). In this hierarchy the upper levels for production managements are linked to the direct control level of programmable logic controllers (PLC) via a non-time-critical communications system (e.g. Ethernet). The fieldbus[2] links the PLCs of the direct control level to the components in the plant of the field level such as sensors, actuators, electric motors, console lights, switches, valves and contactors and replaces the direct connections via current loops or digital I/O signals. The requirement for a fieldbus are therefore time-critical and cost sensitive. Since the new millennium a number of fieldbuses based on Real-time Ethernet have been established. These have the potential to replace traditional fieldbuses in the long term.
フィールドバスには数多くの規格が開発されており、複数のFA機器を接続するために、それぞれ用途に応じたネットワークトポロジーを採用します。
バス型
スター型
リング型
デュアルリング型
フルメッシュ型
ツリー型
いずれのネットワークトポロジーも、マスター/スレーブ方式によってマスター機器がスレーブ機器の協調動作を制御します。通信の仕様は規格により異なるものの、数μsec~数10μsecオーダー(μsec: マイクロ秒)のリアルタイム性が共通的な特徴です。
代表的な規格
シェア上位の規格として「PROFIBUS」「Modbus RTU」「CC-Link」などが挙げられます。
PROFIBUS
1989年にドイツで開発され、2000年に国際規格となったオープンなフィールドバスであり、シンプルなマスター・スレーブ方式で通信を行います。オートメーション・システムと設備の接続を行う「PROFIBUS DP」とPAに特化した「PROFIBUS PA」の2種類が存在し、最大12Mbpsという通信速度の速さやグローバルにサポート・活用される信頼性が特長です。同規格を管理するPI(PROFIBUS & PROFINET International)は産業用イーサネットの主流規格の一つである「PROFINET」の管理も行っています。
Modbus RTU
1979年に米Modicon社によって開発されたPLC用のオープンな通信規格Modbus(モドバス)のフィールドバス用のプロトコルです。通信プロトコルはマスター・スレーブで規定されているものの、運営主体が存在しないことからネットワーク構成やケーブル仕様などが規定されておらず、利用の自由度が高い一方、接続可能性が保証されていない点は留意しておく必要があります。Modbusのイーサネット通信用プロトコルには「Modbus/TCP」があります。
CC-Link
1996年に三菱電機株式会社によって開発されたフィールドバス用の通信規格で、2000年6月にオープン化されました。CC-Linkとは、「Control & Communication Link」の略称です。マスター・スレーブ方式のプロトコルを採用しており、最大10Mbpsの高速通信や伝送距離の長さ、同社シーケンサへの対応といったアドバンテージを持ちます。安全性の確保に主眼を置いた「CC-Link Safety」や、イーサネットベースの「CC-Link IE」シリーズなども開発されています。
リアルタイム性の要求から、フィールドバスの規格はしばしばOSI参照モデルにおける物理層を含めた規格となっています。
一方、近年では、次節でちょっとだけ詳細に踏み込むEtherCATや、上記引用に言及のある「PROFINET」「Modbus/TCP」「CC-Link IE」など、産業用イーサネットのインフラを再利用できる規格も広まっています。産業用イーサネットのインフラの再利用は、通信速度の面で圧倒的な利をもたらします。詳細は下記リンク先を参照してください。
EtherCATのちょっとだけ詳細
EtherCATの通信の仕組み
はじめに、EtherCATの通信の仕組みをご紹介します。EtherCAT(Ethernet for Control Automation Technology)はBeckhoff Automationの開発したフィールドバスで、その名称から想像のつくとおり、産業用イーサネットの物理層を再利用できるフィールドバス規格です。
EtherCATとはドイツのBeckhoff Automation GmbHが開発したイーサネットを使用したオープンネットワークです。現在はETG(EtherCAT Technology Group)により管理されています。 通信帯域を有効活用した高効率通信を特長としています。ノード間のデータ通過時間による遅れを調整した同期制御が実現できるため、モーションコントロール用のネットワークとしても対応できます。
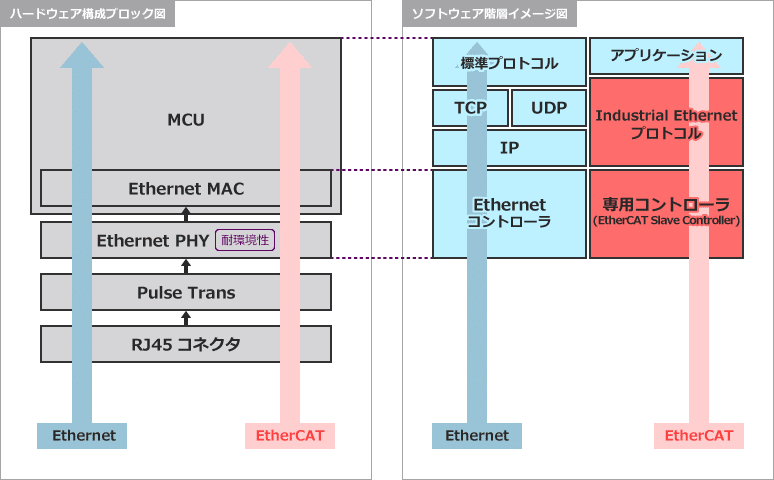
データリンク層では、EtherCATもイーサネットフレームを利用するものの、ESC(EtherCAT Slave Controller)と呼ばれる専用コントローラが通信を制御しています。また、ネットワーク層/トランスポート層においてはIP/TCP/UDP等、Ethernet上で標準的に用いられるプロトコルとは異なる独自プロトコルが採用されます。
EtherCATの標準的なネットワークトポロジーはリング型で、リング型に接続されたマスタ/スレーブ間でイーサネットフレームを巡回させることが特徴です。
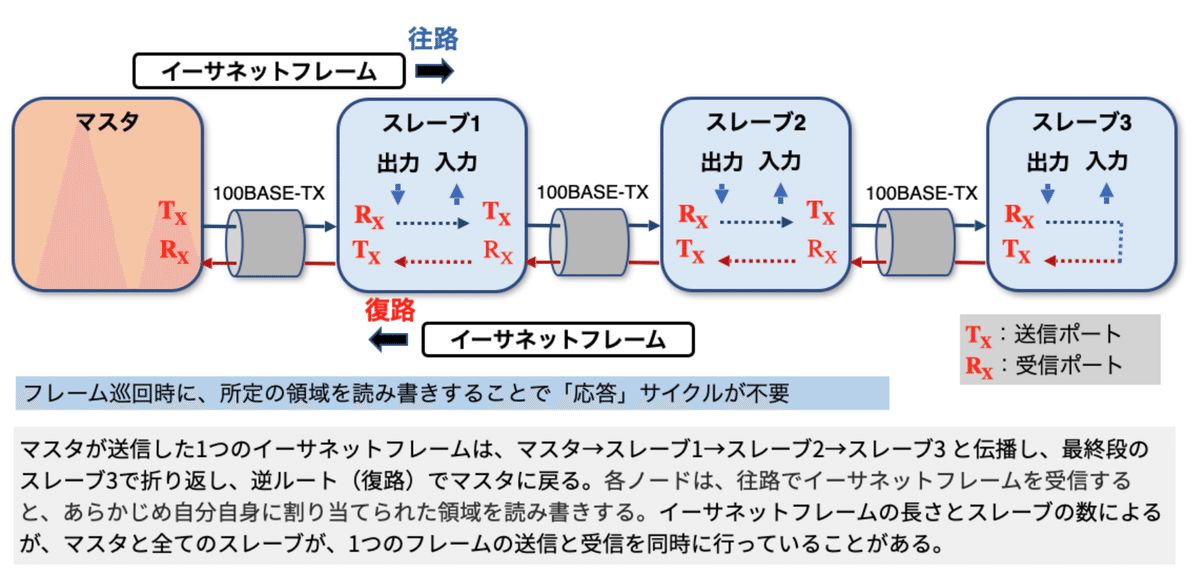
この巡回動作がEtherCATのリアルタイム性の鍵の一つと言えます。これは、100BASE-TXまたは100BASE-FX の全2重モード(イーサネットの標準仕様)で実現によるもので、応答サイクルを不要とし、送信と受信の衝突を回避することで通信サイクルの短縮と安定化を実現します。
EtherCATのリアルタイム性のもう一つの鍵がOn The Fly処理です。これは、各スレーブが巡回するイーサネットフレームの送信、受信、及び自身に割り当てられた領域の読み書きを同時に処理する仕組みで、ESCの最大の特徴です。詳細はぜひ下記リンク先を参照してください。
以上に述べた全2重モードとOn The Fly処理により、EtherCATにおけるイーサネットフレームの伝送は高いリアルタイム性を実現しますが、同期制御という目的を達成する上ではもう一つ、重要な要素があります。それが分散クロック機能です。
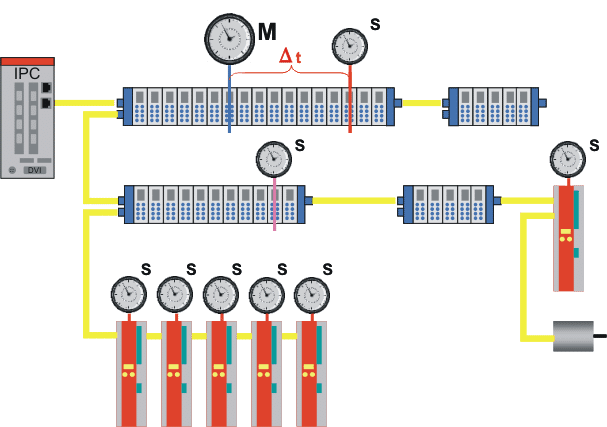
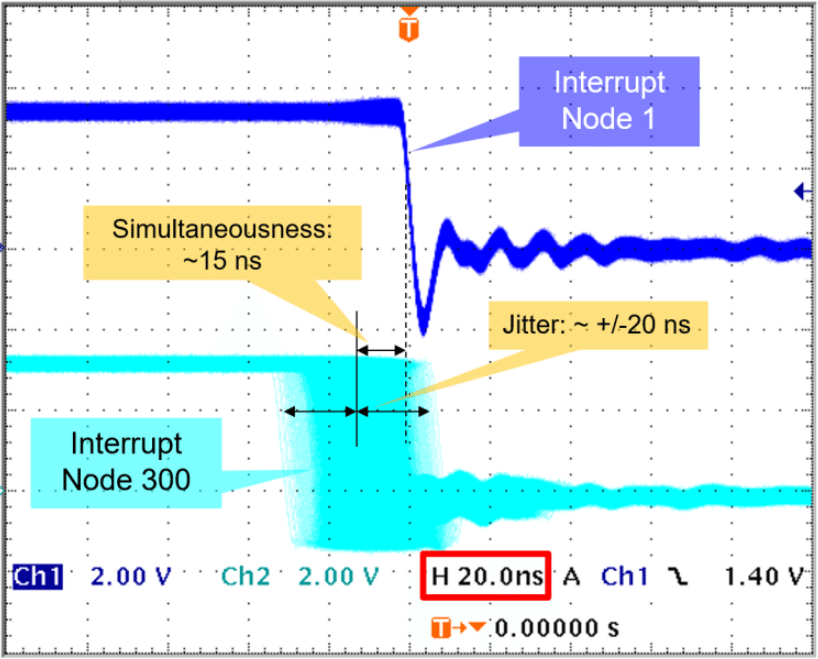
伝送のリアルタイム性をどれほど追求しても、マスタから送信されたイーサネットフレームが各スレーブを通過するタイミングには当然ながら時差が生じます。EtherCATの分散クロックは、この時差をnsecオーダー(nsec: ナノ秒)で計測及び管理することで、スレーブ間の厳格な同期制御を実現しているのです。2つのデバイスの間に300のデバイスと120メートルのケーブルを挟んだ下記の実験によれば、当該デバイス間の分散クロックの誤差は実に15nsec程度であったとされています。
EtherCAT通信の仕組みの解説はここで終わりとしますが、EtherCATの歴史的背景など本稿では触れられなかった点も含め、下記リンク先に興味深い情報が多く掲載されていますのでぜひ参照してください。
EtherCAT P
EtherCAT Pは電源供給機能を統合したEtherCATの拡張規格です。
2016年頃、もう随分前のことになりますが、このEtherCAT Pの登場が一つの契機となってトヨタ自動車がEtherCATの全面採用をハノーバーメッセ2016で公表したことが広く話題ともなりました。
EtherCAT G
昨今のSmart Factory化により、多くの工場にComputer Visionを統合したロボットの登場やエッジAIカメラが導入され、FAネットワークにもギガビット化の潮流が訪れています。
これを受けて登場したのがEtherCAT Gです。EtherCAT Gでは、EBS(EtherCAT Branch Controller)によって、帯域幅の異なるネットワークセグメントを組み合わせ、リアルタイム性の必要な通信が大容量データ伝送の影響を受けないように運用できます。
EtherCAT×イーサネットTSN
従来のイーサネットはベストエフォート型の通信規格であり、通信の性能は保証されません。EtherCATを含むフィールドバスの規格は、このベストエフォート型を前提に数μsec~数10μsecオーダーのリアルタイム性を追求するものです。
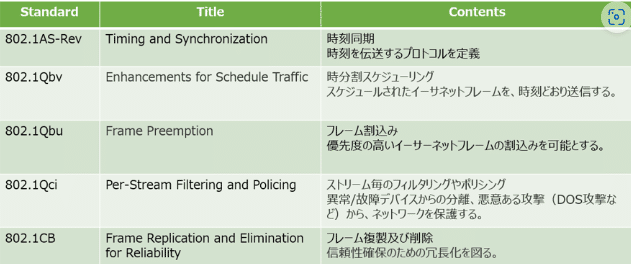
一方、昨今は車載ネットワーク(自動車の内部で制御プログラム間の通信に利用されるネットワーク)の文脈を筆頭に、イーサネットのインフラを再利用しつつもより厳格な性能保証の要求される文脈が生じています。イーサネットTSN(Time Sensitive Networking)はこうした要求に応えるために生まれました。イーサネットISNに関連して、IEEEで下記の複数標準が策定されています。
詳細はぜひ下記リンク先を参照してください。
ETGによれば、EtherCATのマスタ機能をアップグレードすることで、EtherCATとTSNを統合でき、より厳格なリアルタイム性を保証できます。
詳細として下記リンク先も参照してください。
概要においても説明したように、フィールドバスによる同期制御はアーム型ロボットを代表とするFA機器のモーションコントロール精度を支えてきました。イーサネットTSNとの組み合わせによる厳格な性能保証は、より高度なモーションコントロールを実現していくでしょう。
宇宙に進出するフィールドバス
フィールドバスの分野は、多くの優れた技術の集積とわくわくするようなビジネス展開に満ちています。しかし宇宙開発におけるフィールドバスの応用は中でも興味深い動向と言えるでしょう。
以下の論文は、宇宙ロボティクスにおけるEtherCATの応用可能性を多角的に評価したものです。
特に、EtherCATの技術的及び戦略的適性が下記の項目別にまとめられています。興味のある方はぜひ原文に目を通してみてください。
技術的適性
Performance
Topology
Environment
High Availability
Integrated solutions
Testability and Verification
Flexibility of test set-ups
Interfacing to other communication systems or data sources
Cables with low torsional stiffness and rigidity
Safety
Security
戦略的適性
Openness
Large Community
Stability
Cost effectiveness
Proven in robotics
Roadmap
上記の論文はあくまで適性の評価と、試験的なマニピュレータでの実装の状況をまとめたものですが、ETGもこの論文をベースとしたホワイトペーパを公開しており、宇宙開発への応用に対する積極的なスタンスをみてとることができます。今後の実環境への適用事例が待ち遠しいですね。
まとめ
本稿では、フィールドバスの概要をご紹介すると共に、特定のフィールドバス企画としてEtherCATを取り上げ、通信の仕組みを含むちょっとした詳細に触れました。多くの人が普段触れることのない技術領域ながら、技術的にもビジネス的にも刺激的な世界だったのではないでしょうか。日本の誇りであるモノづくりの現場を支える縁の下の力持ちとして、頭の片隅に留めていただき、関連するニュースなどが流れてきた際にはぜひ注意を向けてみてください。
また本稿と関連のある技術領域として、モーションコントロールや車載ネットワークについても独立してご紹介したいと思っています。いずれ記事にしていくつもりですので、関心のある方はお待ちいただけると幸いです。