
宇宙ごみの運動推定のための実証衛星

近藤 耕太(こんどう こうた)
宇宙空間には「宇宙ごみ」とか「スペースデブリ」と言われる,微小なものを含めると約5兆個以上の物体が漂っている.それが秒速7kmという速度で地球を周回しており,運用中の衛星に衝突した場合には,衛星の機能に致命的な損傷を与える.
そのため,宇宙ごみの除去が最近重要な課題になっているが,宇宙ごみの姿勢を推定することは非常に難しく,除去衛星が回転する宇宙ごみに接近して捕獲できた例はない.
宇宙ごみの除去成功率向上のために,回転する宇宙ゴミが太陽光を反射する光の強度変化,つまりライトカーブを用いた宇宙ごみの姿勢推定システムを衛星の軌道上で実証することが本プロジェクトの最終ゴールである.
ただ,未踏実施期間内に実証衛星を打ち上げることができないため,プロジェクトの中では軌道上で,一反木綿のような膜で太陽光を反射しつつ,自分の姿勢を計測して地上へ送信する機能を持つQ-Liという人工衛星の設計に取り組んだ(図-1).ライトカーブと姿勢の相関がこれによって正確に関連付けられる.
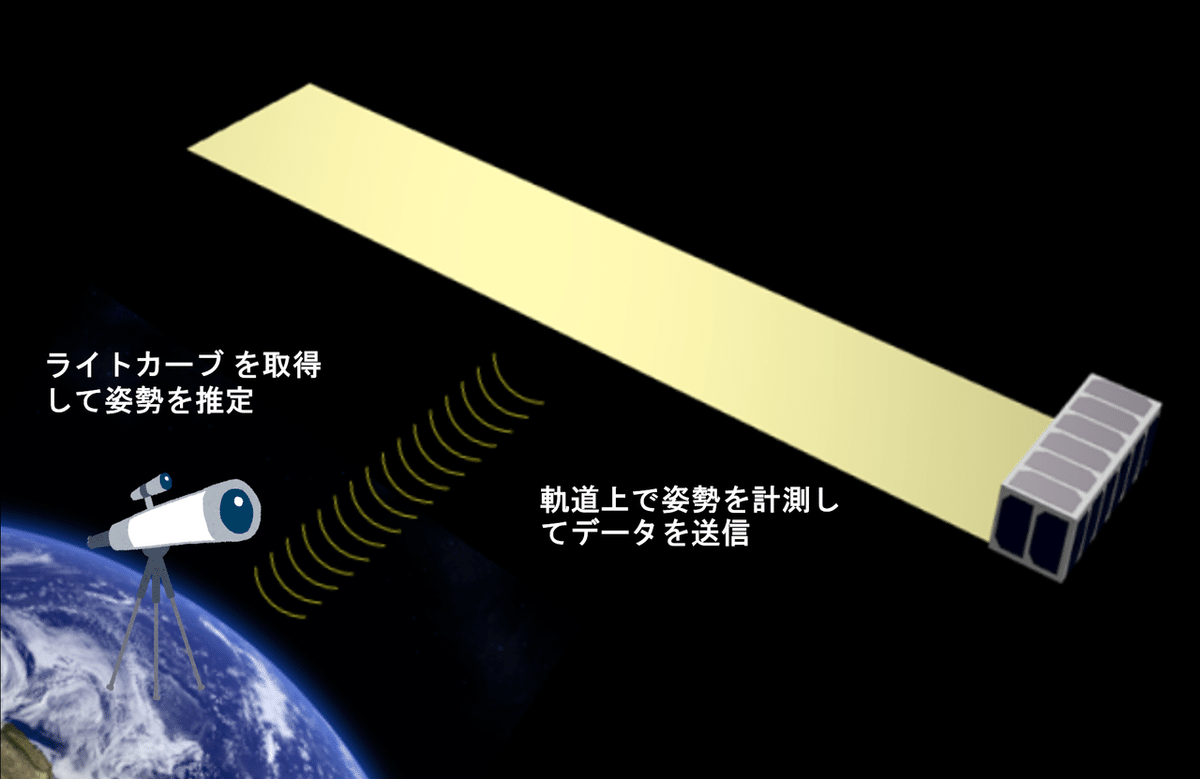
図-1 膜を展開した実証衛星Q-Li
本プロジェクトを推進した3人のメンバの中で,近藤君は安全な膜展開の実現に向けた姿勢制御システムを担当した.Q-Liが高速で回転すると,膜展開によりQ-Li本体,もしくは膜機構そのものを損傷する危険性があるため,Q-Liの角速度を小さくする(デタンブリング)必要がある.
デタンブリングを達成するために利用される磁気トルカとは,コイルに磁気を発生させることで,地球の磁場と作用して実機の方向を制御するものであり,基本的にXYZの3軸があれば全方向を調整することができる.
ただ,実証衛星には大きさ,重さ,そして予算を低減させるために,なるべく少ない制御入力を使用することという制約条件が課せられており,近藤君は1軸だけでこの制約を克服し,デタンブリング制御を達成できる姿勢制御システムを開発した.
理論上は,人工衛星が高速回転していることから,1軸だけの制御入力でも時系列を調整することで,全方向に対して磁場を作用させることができるが,そのためには限られた計算能力の中で素早く磁気トルカを作用させるためのアルゴリズム選択と実装が必要不可欠であった.
近藤君が取り組んだことを一言で言えば,お金をかけるよりソフトウェアで勝つというもので,ハードウェアの制約をソフトウェアによって超越させることは,プログラマ冥利に尽きるといえよう.
近藤君は実時間最適化制御則であるNMPC(非線形モデル予測制御,Nonlinear Model Predictive Control, NMPC)をQ-Liに応用した.従来手法としてよく使用されてきたB-dot制御に比べ,NMPCを用いたほうが短い時間,少ない制御入力でデタンブリングを達成できた.またNMPCが生成した滑らかな制御入力をPWM(Pulse Width Modulation) で離散化することにより,アクチュエータにかかる負担を大幅に低減することができた.図-2はNMPCとPWMを用いてデタンブリングした結果を示している.

図-2 NMPCとPWMを用いたデタンブリング
先行研究では広く3軸磁気トルカを用いた姿勢制御が取り扱われてきた.しかしながらQ-Liは大きさ,重量,コスト面で厳しい制約があることから,磁気トルカは1軸のみの搭載も考慮する必要がある.3軸磁気トルカを用いた場合でも,衛星のデタンブリングは困難だが,1軸磁気トルカのみを用いた場合はさらに問題が複雑になる.近藤君は1軸磁気トルカの実現可能性に関して,シミュレーションと理論的な考察を行い,その成果を米国航空宇宙学会(AIAA)で発表し,注目を集めた.(田中邦裕PM担当)
[統括PM追記] とうとう未踏も宇宙に飛び出した.発展する未踏を象徴するプロジェクトだった.このプロジェクトは実は3人で取り組んだものだったが,この一反木綿衛星の制御を担当したのが近藤君だった.1軸だけの制御で,3軸を安定化できるとは予想外である.この成果のおかげだと思うが,彼は米国の御三家の有名大学からオファーを受け,MITに進学することになった.なお,この衛星自身が宇宙ゴミにならない工夫もちゃんとなされている.
(2021年6月30日受付)
(2021年8月15日note公開)