Hakobotの自動配送ロボットの紹介 - 自動運転ソフトウェア編 -

こんにちは、Hakobotの大山です。今回の配送ロボットフェーズ1の開発では、主に屋内での利用を想定した、非SLAMでの自動運転システムの実装を行いました。
モノラルカメラのみで自動運転走行を実装
今回の自動運転システムは、Hakobotの自動配送ロボットに設置された前後左右4つのモノラルカメラと超音波センサーのみでの実装されています。
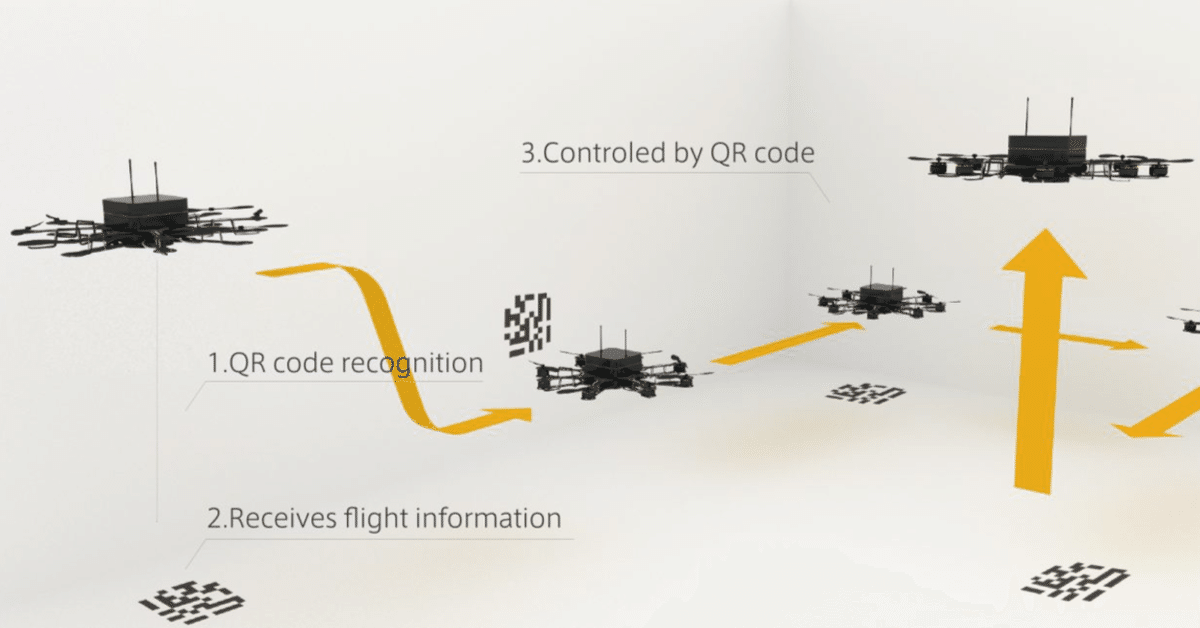
開発協力を行ってくれた株式会社Spiralは、非SLAM屋内型ドローンの自律飛行システムを開発しており、このシステムをベースに、陸上で置き換えての開発を行いました。
システムの詳細としては、走行軌道上に貼り付けられたマーカーを読み込むと、予め設定していた走行指示のもと自動運転走行を行うという、とてもシンプルな仕組みです。このシステムを活用することで、LiDAR等の高性能センサーが必要なくなるため、ハードウェアの製造コストが下げられるのと、ソフトウェアの負荷も軽減され、安定した運用が可能になります。

誰でも簡単に走行プランを構築可能
走行プランの構築は、Hakobotの自動配送ロボットに接続されているタブレット端末から、予め読み込んでおいた地図データ上に走行軌道順にピンを置き、ピンごとに走行プランを設定、貼り付ける予定のマーカーをカメラに読み込むことで、走行プランの構築が完了します。
わかりやすい操作方法と直感的なUIで、誰でも簡単に走行プランを構築することが可能です。

マーカーを追従する自動運転走行も可能
マーカーに走行指示を設定する仕組みを活用し、マーカーが貼り付けられている動く物体を追従する自動運転走行も行うことができます。
人間を追従する設定を行うことで、重い荷物を力を使わず目的地まで運ぶなど、すぐに実運用が可能な自動運転システムだと考えています。

<株式会社 Spiral のご紹介>
事業内容:非GPS環境下におけるドローン自律飛行システムの開発
https://spiral-robotics.com/