
公式、数式変形、ワザなど

力学の数式を扱うときによく出会う公式、式変形、近似の技などをあげてみた。
1 d2x/dt2 とd2y/dt2 の複合式→それぞれの式
具体的には
$${m\Bigl(\dfrac{d^2x}{dt^2}\sinθ+\dfrac{d^2y}{dt^2}\cosθ\Bigl)=‥‥}$$
$${m\Bigl(-\dfrac{d^2x}{dt^2}\cosθ+\dfrac{d^2y}{dt^2}\sinθ\Bigl)=‥‥}$$
から
$${m\dfrac{d^2x}{dt^2}=‥‥}$$
$${m\dfrac{d^2y}{dt^2}=‥‥}$$ を導くということである。
運動方程式を回転系に座標変換するときに出てくるが、2つの方法がある。
1-1. それぞれにsinθ、cosθ をかけて足し算する

1-2. 連立方程式として解く

2 Eulerの公式
$${e^{i\theta}=\cos\theta+i\sin\theta}$$
$${\cos{\theta}=\dfrac{e^{i\theta}+e^{-i\theta}}{2} \sin{\theta}=\dfrac{e^{i\theta}-e^{-i\theta}}{2}}$$
3 微分式の変形
$${x\ddot{y}-\ddot{x}y=x\ddot{y}+\dot{x}\dot{y}-(\dot{x}\dot{y}-\ddot{x}y)=(x\dot{y}-\dot{x}y)'}$$
$${\dot{x}\ddot{x}=\Bigl(\dfrac{1}{2}\dot{x}^2\Bigl)'}$$
4 全微分
$${df=\displaystyle\sum_{i=1}^n\dfrac{\partial f}{\partial q_i}dq_i=\dfrac{\partial f}{\partial q_1}dq_1+\dfrac{\partial f}{\partial q_2}dq_2+‥‥‥+\dfrac{\partial f}{\partial q_n}dq_n}$$
$${\dfrac{df}{dt}=\displaystyle\sum_{i=1}^n\dfrac{\partial f}{\partial q_i}\dfrac{dq_i}{dt}=\dfrac{\partial f}{\partial q_1}\dfrac{dq_1}{dt}+\dfrac{\partial f}{\partial q_2}\dfrac{dq_2}{dt}+‥‥‥+\dfrac{\partial f}{\partial q_n}\dfrac{dq_n}{dt}}$$
$${=\displaystyle\sum_{i=1}^n\dfrac{\partial f}{\partial q_i}d\dot{q_i}=\dfrac{\partial f}{\partial q_1}\dot{q_1}+\dfrac{\partial f}{\partial q_2}\dot{q_2}+‥‥‥+\dfrac{\partial f}{\partial q_n}\dot{q_n}}$$
$${\dot{f}=\displaystyle\sum_{i=1}^n\dfrac{\partial f}{\partial q_i}d\dot{q_i}=\dfrac{\partial f}{\partial q_1}\dot{q_1}+\dfrac{\partial f}{\partial q_2}\dot{q_2}+‥‥‥+\dfrac{\partial f}{\partial q_n}\dot{q_n}}$$
$${\dfrac{\partial\dot{f}}{\partial\dot{q_i}}=\dfrac{\partial}{\partial{\dot{q_i}}}\Big(\displaystyle\sum_{i=1}^n\dfrac{\partial f}{\partial q_i}d\dot{q_i}\Big)=\dfrac{\partial}{\partial{\dot{q_i}}}\Big(\dfrac{\partial f}{\partial q_1}d\dot{q_1}+\dfrac{\partial f}{\partial q_2}d\dot{q_2}+‥‥+\dfrac{\partial f}{\partial q_n}d\dot{q_n}\Big)=\dfrac{\partial{f}}{\partial{q_i}}}$$
5 座標系の回転
5-1 2次元座標の回転

$${\begin{bmatrix}x'\\y'\end{bmatrix}=\begin{bmatrix} \cos\theta \sin\theta\\-\sin\theta \cos\theta\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix}=R(\theta)\begin{bmatrix}x\\y\end{bmatrix}}$$
5-2 3次元座標の回転

$${\begin{bmatrix}x_1\\x_2\\x_3\end{bmatrix}=\begin{bmatrix} \cos{ψ} \sin{ψ} 0\\-\sin{ψ} \cos{ψ} 0\\ 0 0 1\end{bmatrix}\begin{bmatrix} \cos{θ} 0 -\sin{θ}\\ 0 1 0\\ \sin{θ} 0 \cos{θ}\end{bmatrix}\begin{bmatrix} \cos{φ} \sin{φ} 0\\-\sin{φ} \cos{φ} 0\\ 0 0 1\end{bmatrix}\begin{bmatrix}x\\y\\z\end{bmatrix}}$$
$${=\begin{bmatrix} \cos{ψ} \cos{θ} \sin{ψ} -\cos{ψ}\sin{θ}\\-\sin{ψ}\cos{θ} \cos{ψ} \sin{ψ}\sin{θ}\\ \sin{θ} 0 \cos{θ}\end{bmatrix}\begin{bmatrix} \cos{φ} \sin{φ} 0\\-\sin{φ} \cos{φ} 0\\ 0 0 1\end{bmatrix}\begin{bmatrix}x\\y\\z\end{bmatrix}}$$

6 d2θ/dt2=-ωθ 形の微分方程式の解法
$${\dfrac{d^2\theta}{dt^2}=-ω\theta}$$の解法を示す。
6-1 θ=e^(λt)とおく
$${\theta=e^{λt}}$$、$${\ddot{\theta}=λ^2e^{λt}}$$を代入、$${e^{λt}}$$を消去し$${λ}$$の特性方程式を解く。得た$${λ}$$から得た一般解の線形結合が解である。Eulerの公式を使って三角関数の形式に直すことが多い。

6-2 dθ/dtをかける
式に$${\dfrac{d\theta}{dt}}$$をかけて整理したものを積分し、得た$${\dfrac{d\theta}{dt}}$$についての2次方程式を解く。$${\dfrac{d\theta}{dt}=〇}$$(同次形1階微分方程式)を解く。

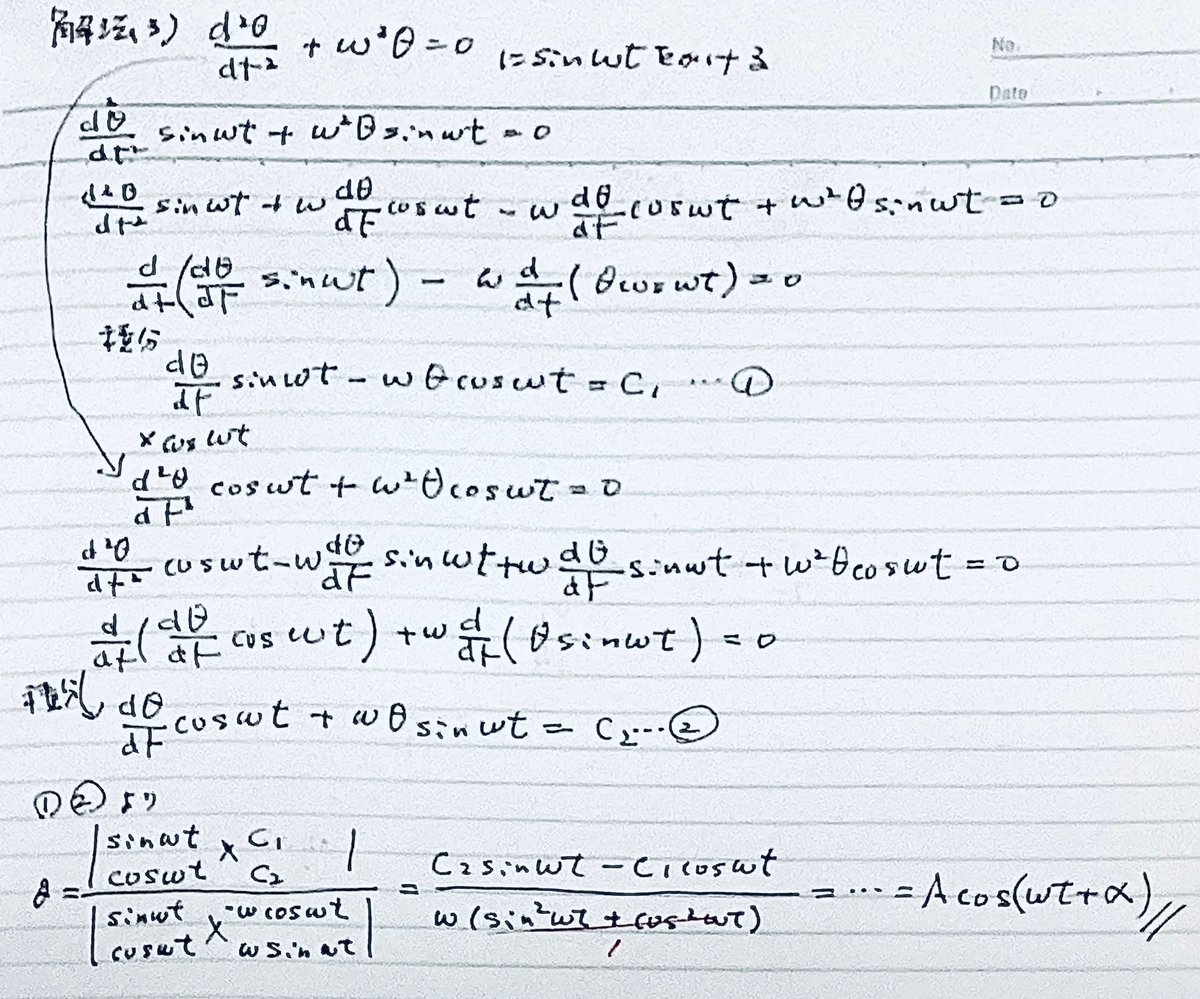
6-3 sinθ、cosθをかける
$${\sin{〇ωt}}$$、$${\cos{〇ωt}}$$をかけて整理したものをそれぞれ積分した式を$${\theta,\dot{\theta}}$$の連立方程式として$${\theta}$$を求める。
7 重力加速度とは
地球の半径を$${R}$$、質量を$${M}$$、ある物体の地表からの高さを$${h}$$、質量を$${m}$$とする。
万有引力定数を$${G}$$ とすると、物体に働く万有引力は $${F=G\dfrac{Mm}{(R+h)^2}}$$
重力加速度を$${g}$$とすると、ニュートンの第2法則より $${F=mg}$$
両式をあわせて
$${mg=\dfrac{GMm}{(R+h)^2}=\dfrac{GMm}{R^2}}$$ (← $${R\gg h}$$ なので $${R+h\approx R}$$)
よって$${g=\dfrac{GM}{R^2}}$$
8 積分して微分
$${\dfrac{d}{dt}\displaystyle\int_0^xF(x)dx=F(x)}$$ ただし、逆の微分して積分は成り立たない。
9 3次元ベクトルの外積の成分表示

10 逆関数の逆関数
$${f(f^{-1}(x))=x}$$ 例えば $${\ln(e^x)=x, \sin(\arcsin\theta)=\theta}$$