実験用FPVドローンの自作(3)組み立て編

2.5インチFPVドローンの自作に挑戦する初心者に向けて、自分の経験を備忘録として共有します。自身が初心者だった立場から、苦労した点や工程について記録します。仕様決め、部品選び、組み立て、フライトコントロールソフトウェアのインストール、テスト飛行、トラブルシューティングなど、初心者目線でまとめます。
今回はその中の(3)組み立て編です。
組み立て
部品選び編で購入したパーツを使った基本的な部分の組み立ての記録を残します。初心者の私がやり易いと思った組み立て方や順番なので、初めてドローンを自作する方にとっては参考になるのではと思います。
1. 入出力の割り当て 最初に搭載機器を接続するFCの入出力チャネルを決めておきます。今回は接続する機器数が3なので余裕がありますが、増えてくるとチャネル不足などの心配も出てきます。接続する前に確認しておくことが必要です。FCにはUART(Universal Asynchronous Receiver Transmitter)という非同期式のシリアル通信用の入出力チャネルが複数用意されています。SpeedyBeeF405miniはUARTが1~6チャネルまでありますが、UART4は外部とのBluetooth接続用として、UART5はESCとの通信に割り当て済みなので使えません。UARTの他にもI2Cという同期式のシリアル通信が用意されています。これはSDA(データ線)とSCL(クロック線)で構成されます。今回は搭載しませんが磁気コンパスもI2Cを使うので、測距センサなどと併用したい場合はI2Cが複数用意されたFCを選択したほうが良いと思います。

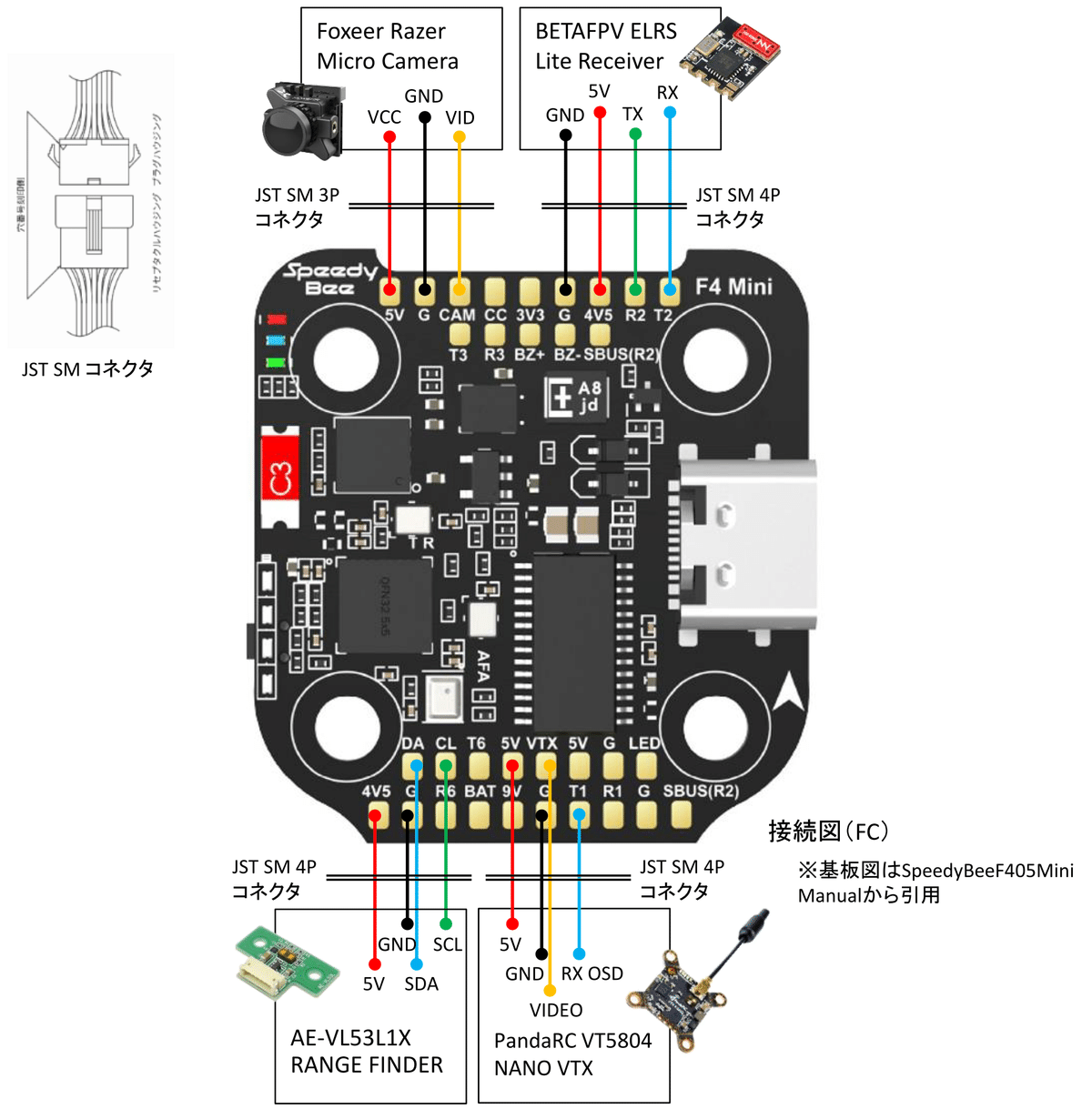
2. 搭載機器の接続 FCと搭載機器をケーブルで接続します。このときケーブル中継接続用のコネクタを間に挟むことにします。仕様編にも書きましたが一本のケーブルではんだ付け接続してしまうと、あとでパーツ交換するときにFC側のはんだ除去と再はんだが必要になり、2.5インチドローンの小さな搭載容量ではFCを取り外す必要が出てきます。特に今回は実験用ドローンなのでコネクタはあった方が便利だという判断です。空きのチャネルにもコネクタ付きケーブルをはんだ付けしておき、後で機器の追加がスムーズにできるようにするのも良いかもしれません。コネクタは定格電流とコネクタサイズから日本圧着端子製造(JST)のSM型としました。
接続図を下図に示します。UARTの基本的な接続方法では機器側のTX(送信)とFC側のRX(受信)、機器側のRXとFC側のTXを接続します。VTXのSMARTAUDIOのように一方通行の通信では、機器側のRXとFC側のTXの接続だけです。I2CではDAとDA、CLとCLを接続します。またカメラのVID(ビデオ出力)をFCのビデオ入力(CAM)に接続します。搭載機器の電源は機器側の5V入力とFC側の5Vまたは4V5(4.5V)を接続します。SpeedyBeeF405miniの4.5V出力はUSBからの供給が可能になっているので、パソコンとFCをUSB接続するだけで搭載機器の確認ができます。
ケーブルのFCへのはんだ付けですが、これが慣れないうちはとても難しいのです。はんだ付けの経験は少しはあったのですが、このような小さな面積にぎっしり並んだ2mm四方のパッドに被覆をむいた電線をはんだ付けしたことなどありませんでした。はんだがうまくのらないし隣のパッドにくっつくしやり直しているうちに電線が疲労断線するし散々でした。この経験で得たノウハウは次のとおりです。
・こては温度制御できるものを使う。370℃が使いやすいと思いました。
・こて先は熱を伝え易い形状(マイナスドライバのような形)に交換する。
・予備はんだ(あらかじめパッド上にはんだを盛る)を行う。
・被覆がシリコーン製(はんだの熱で溶けない)のケーブルを使う。
・フラックスは惜しまず使う。べとべとになったら無水アルコールで除去。
・FCはしっかり固定する。こてを押し付けても動かないように割りばしで挟んでシリコーンシートの上にテープで固定すると良いです。
・老眼には拡大眼鏡を使う。安全上もお勧めします。
・失敗を恐れず何回でもやり直す。はんだ吸い取り線とフラックスがあればリセットできます。
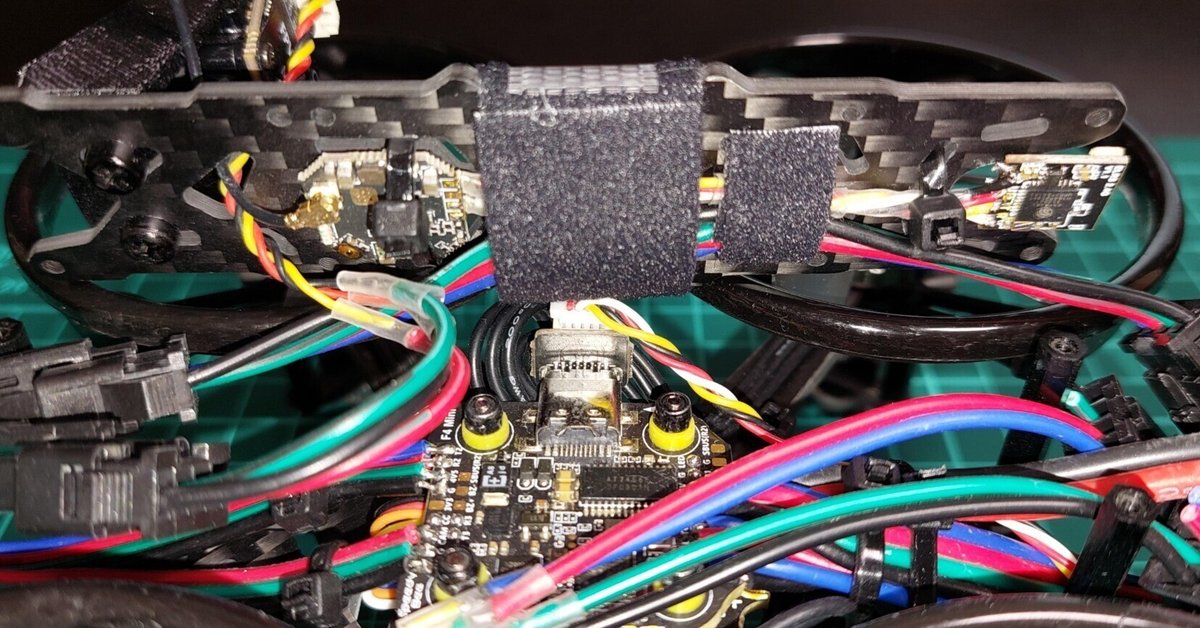
次の写真はなんとかはんだ付けを終えた状態のFCです。初心者がやるとこうなるという例です。このときのケーブル被覆はシリコーンではないので溶けています。

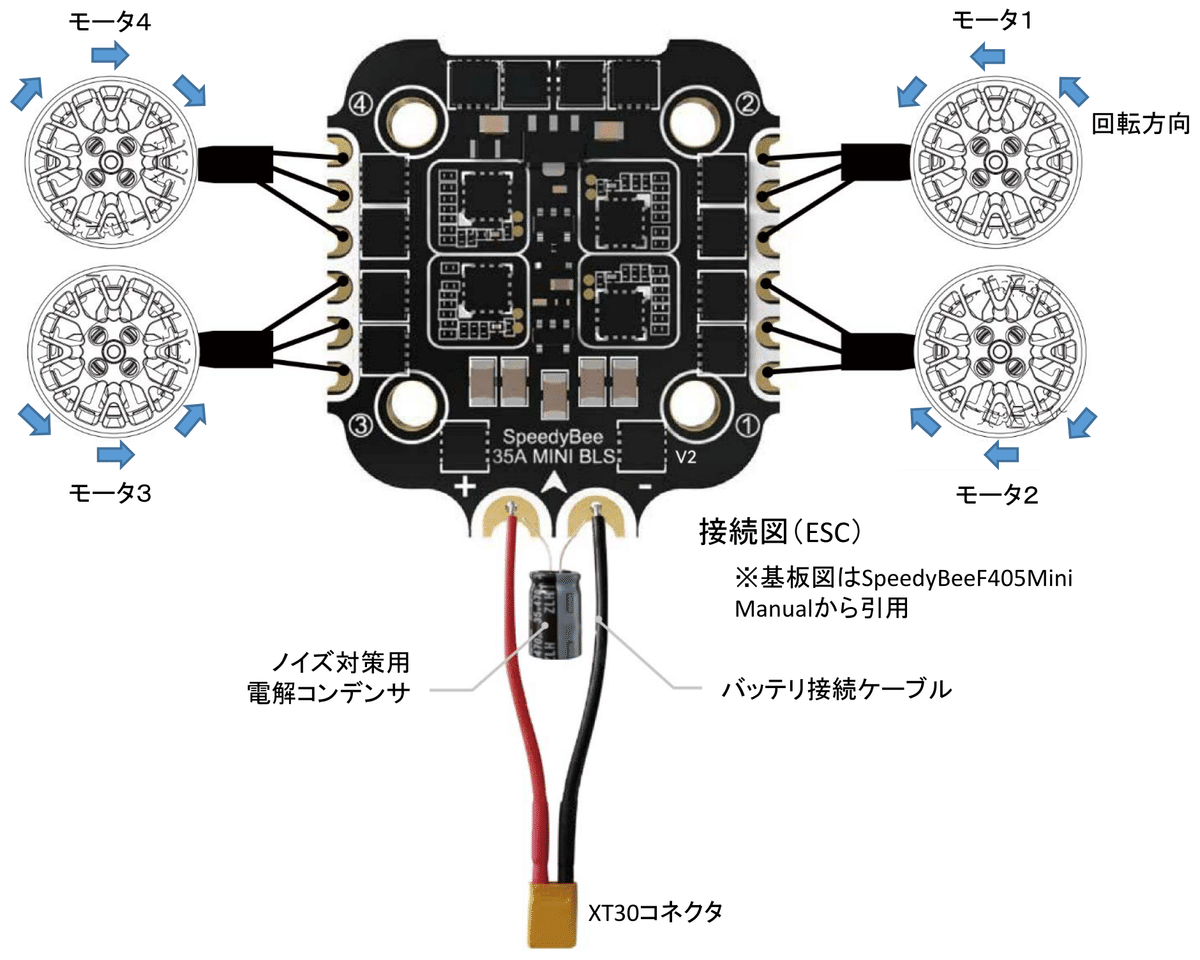
3. モータとバッテリケーブルの接続 次にESCです。接続図を下図に示します。まず付属のバッテリケーブルとノイズ対策用の電解コンデンサをはんだ付けします。電解コンデンサは極性がありリード線の長いほうが+です。ここはバッテリの着脱時にストレスがかかりやすい部分です。はんだスペースは十分あるのではんだてんこ盛りでしっかり接続します。
次にモータを接続します。パッドはFCより大きく配置にも余裕があるので、はんだ付けはFCのときよりやり易いと思います。モータから出ている3本のケーブルをESCのそれぞれのチャネルにはんだ付けします。ブラシレスモータなので原理上3本のケーブルの接続に順番はありません。ケーブルの色も全部同じです。一つ注意しておいた方が良いのは、フライトコントローラのソフトウェアによってモータ番号のつけ方が異なるということです。これはソフトウェアの設定のときに重要になってくることなのですが、図中の基板上に書かれた①②③④はBetaflightの場合で、今回インストールする予定のArdupilotの場合はモータ1,2,3,4という順番になります。また基板上の白い矢印の方向がドローンの機首の方向を示します。モータの回転方向(プロペラの回転方向)はモータ1と3がCCW(反時計回り)、モータ2と4がCW(時計回り)です。この逆のパターンもあるようですが稀なケースだと思います。
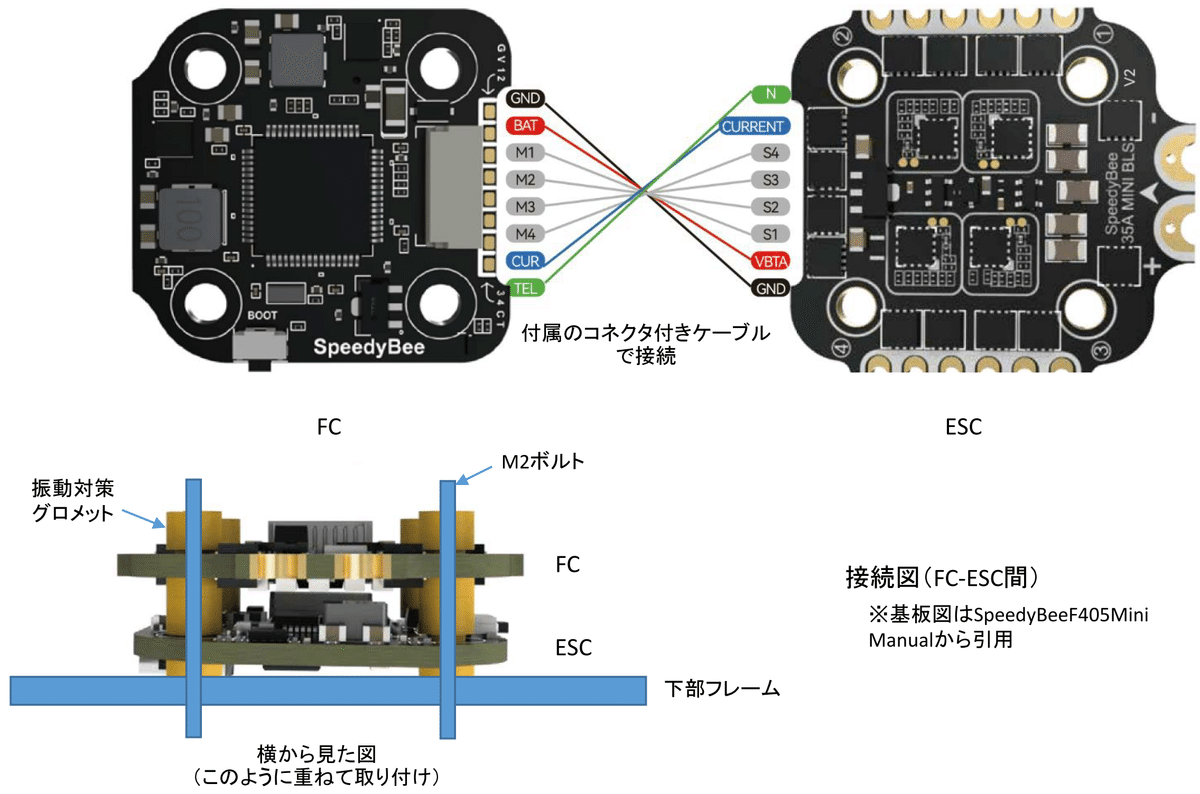
4. FCとESCの取り付け FCとESCを付属のコネクタ付きケーブルで接続後、下図のように重ねて下部フレームにM2のボルトで固定します。最初は緩く仮止めして、モータのケーブルが無理に曲がったりしないようにケーブルの位置を調整しながら固定します。

5. モータとプロペラの取り付け 下部フレームにモータを取り付けます。モータの軸を上に向け、プロペラガードをフレームとモータの間に挟んでモータ固定ボルトで固定します。稀に下向きで固定するプッシャータイプというものもあるようです。モータのケーブルはフレームを這うようにケーブルタイで固定します。余った配線はESCの横のスペースに曲げて収納し、ケーブルがプロペラに接触しないようにフレームに固定します。
次にプロペラの取り付けです。プロペラにはCW用とCCW用の2種類があるので注意が必要です。上の接続図(ESC)で示したモータの回転方向に合うプロペラを選択してモータの回転軸に差し込み、プロペラ固定ボルトでモータのロータに固定します。下の図に示すように回転方向に向かってプロペラピッチが上に口を開けた形になっていれば正しいプロペラです。空気の中をねじり込んで登ってゆくイメージです。

6. 脚 脚は適当にパーツを組み合わせて作りました。下図のようにM2のナイロンスペーサ、TPUパーツ、クッションゴムをつなぎ合わせ、下部フレームのスペアホールにボルトで固定しました。これで接地状態でのプロペラ回転面から地面までの距離はプロペラ直径程度になりました。ナイロンスペーサはゆがむことで衝撃も吸収してくれそうです。

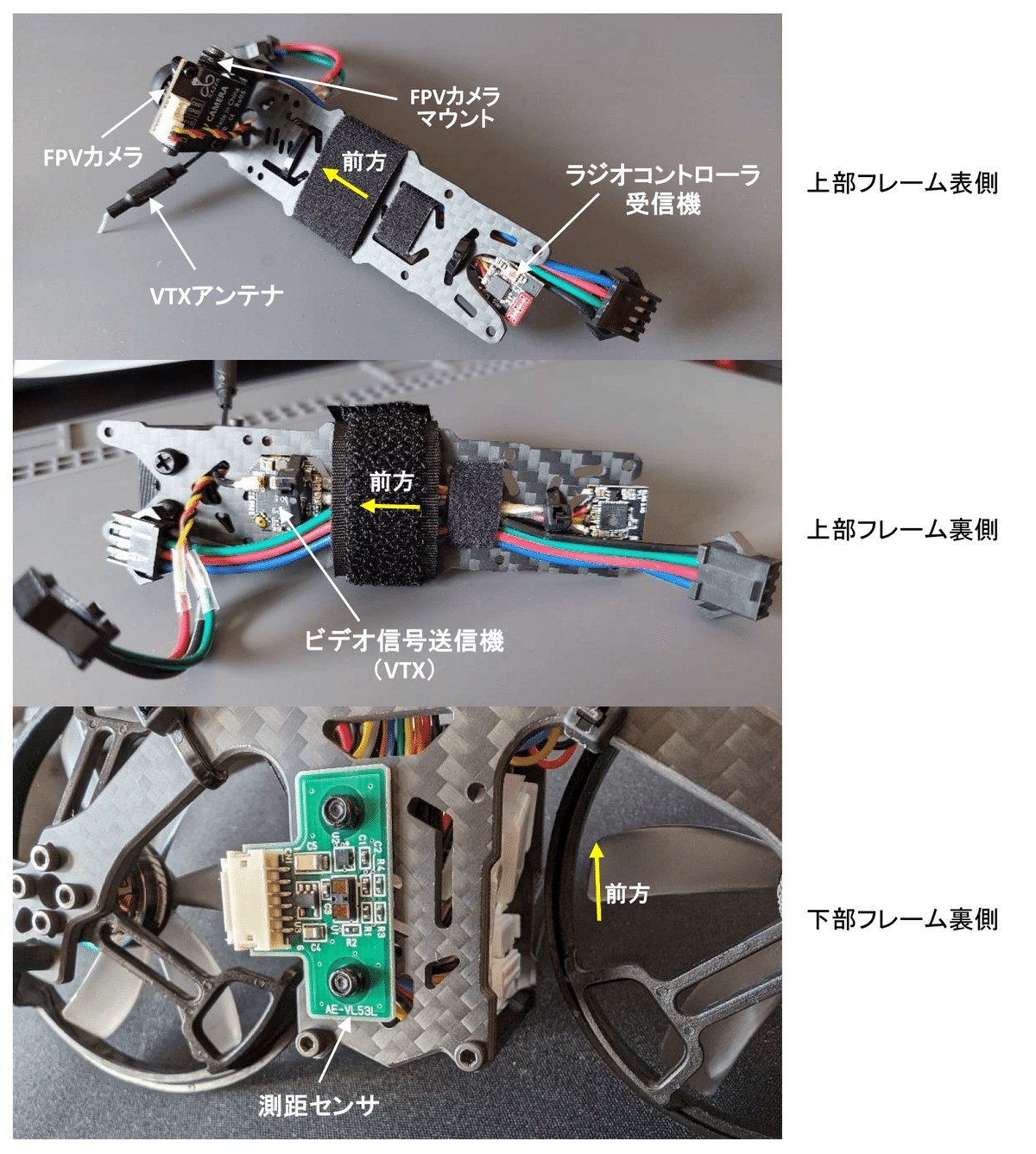
7. 搭載機器の取り付け 搭載機器は下図に示すように取り付けました。カメラと測距センサ(下向き)は取り付け位置に制約がありますが、VTXとラジオコントローラ受信機は空いている適当なスペースを探して固定しました。今回はケーブルタイと面ファスナーで固定しましたが、基板むき出しパーツを固定するときには厚さ1~2mmのはがせる両面テープが良いようです。また屋外飛行するドローンでは基板自体を透明の収縮チューブに入れて保護することも大切かもしれません。
8. 上部フレームの取り付け 上部フレームを下部フレームにM2ナイロンスペーサとボルトで固定します。上部フレームにはバッテリ固定用のファスナー付きベルトを通しておきます。またケーブルが横にはみ出してプロペラに接触したりしないように配線を整えます。

9. 重量測定 バッテリ込みの重量測定結果は258gでした。目標の300g以下はクリアです。重量軽減は考えていないのでこのとおりの結果になりましたが、屋内実験用ドローンですから…。
