
clusterのMetaGadgetで外部出力のメモ

clusterのMetaGadgetで外部にデータを送れるようになったので
実際にやってみた時のメモです。何かの参考になればどうぞ。
元のGitHubに始め方があります。(少しだけ補足)
動作環境
Raspberry Pi 4B 4GB
Raspbian buster
Pythonは3.8以上
私の場合、ライブラリをインストールしようとするとエラーがでました。
pi@raspberrypi:~ $ pip install metagadget RPi.GPIO
Defaulting to user installation because normal site-packages is not writeable
Looking in indexes: https://pypi.org/simple, https://www.piwheels.org/simple
ERROR: Ignored the following versions that require a different python version: 0.0.3 Requires-Python >=3.8; 0.0.4 Requires-Python >=3.8
ERROR: Could not find a version that satisfies the requirement metagadget (from versions: none)
ERROR: No matching distribution found for metagadgetPythonが3.8以上でないといけないようです。(3.7.3でした)
次のサイトを参考に3.8にするとインストールできました。
(OSがRaspbian busterと古かったので、新しくしてもよいと思います)
ngrokの登録と取得
「ngrok」を使用しますので、アカウント登録します。
登録後に、「Auth Token」と「Domain」が必要になります。
「Auth Token」は左のメニューの「Your Authtoken」になります。
「Copy」でコピーして、どこかに貼り付けておきます。

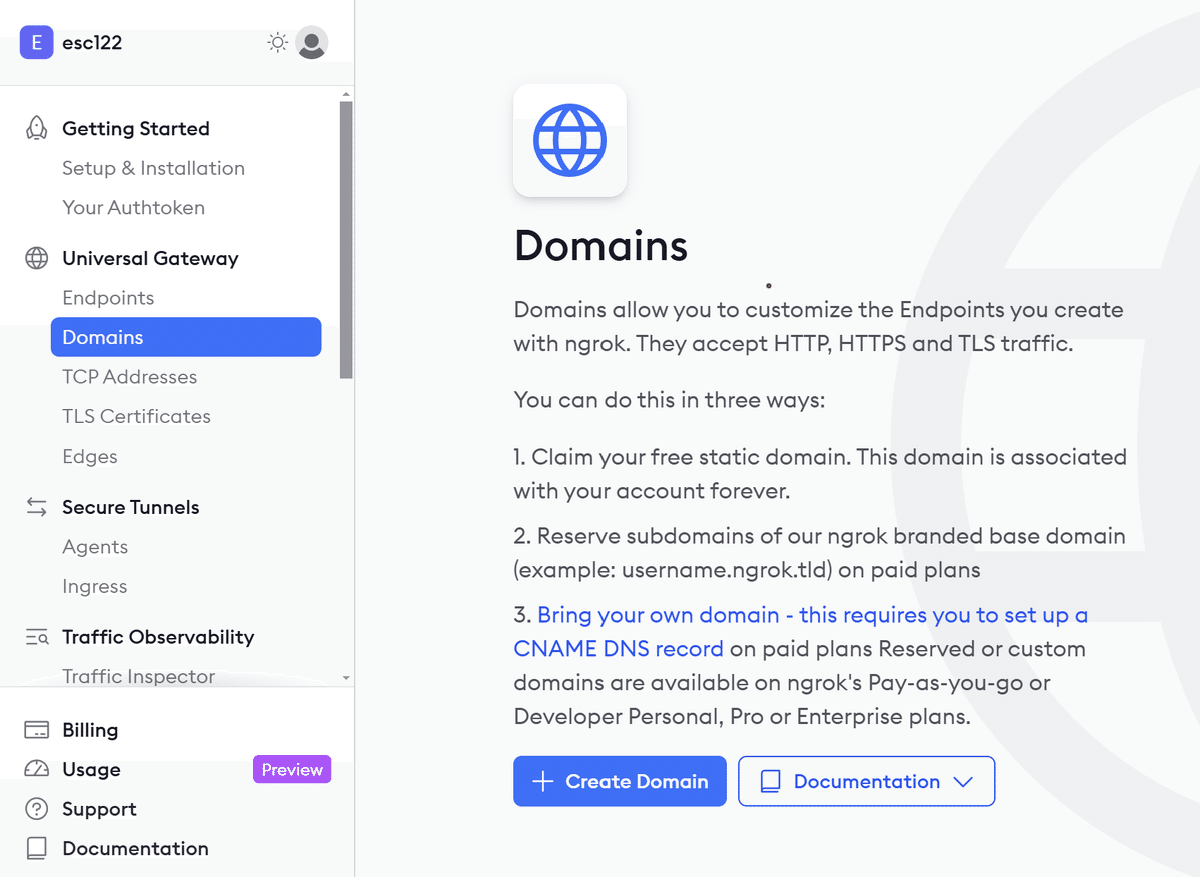
「Domain」は左のメニューの「Domains」から「Create Domain」で作成されます。「Domain」の部分をコピーして、どこかに貼り付けておきます。
動作確認(ON・OFF)
あとは、公式の内容通りです。。
とりあえずclusterからLED光らせるのやってみました!データ送るのが、簡単にできるようになってます。(うちのRaspberryPiが前使ってたから、Python3.7だと使えなくて、3.8に上げたくらい。。) https://t.co/aVDumLjt5C pic.twitter.com/EoRBfDnNnU
— エス。。 (@esc122e) November 16, 2024
数値の送信と頻度
数値を送ることも可能ですので、サーボモータを動かしてみました。
RaspberryPI側のコードはこちら。
from gpiozero import AngularServo
from gpiozero.pins.pigpio import PiGPIOFactory
from time import sleep
from metagadget import MetaGadget
SERVO_PIN = 12
MIN_DEGREE = -90
MAX_DEGREE = 90
def main():
factory = PiGPIOFactory()
servo = AngularServo(SERVO_PIN, min_angle=MIN_DEGREE, max_angle=MAX_DEGREE,
min_pulse_width=0.5/1000, max_pulse_width=2.4/1000, frame_width=1/50,
pin_factory=factory)
app = MetaGadget()
@app.receive
def hundle(data):
angle_input = (int(data) / 180) * 180 - 90
if -85 < angle_input < 85:
servo.angle = angle_input
sleep(0.1)
print(data, angle_input)
app.run()
if __name__ == "__main__":
main()数値の送信のサンプルはこちら。
モータ動作の参考はこちらのサイトです。
アイテムのスクリプトはこちら。
アイテムの角度を読み込んで送ってます。
ただ、送る頻度に制限があるり、間隔が小さいとエラーが出ます。
このため、タイマーを入れてます。
let prevTensDigit = null;
$.onStart(() => {
$.state.waitingTime = 0;
});
$.onUpdate(deltaTime => {
let position = $.getPosition();
let angle = Math.atan2(position.z, position.x);
let angleInDegrees = Math.abs(Math.round(angle * (180 / Math.PI)));
$.setStateCompat("this", "angleInDegrees", angleInDegrees);
let currentTensDigit = angleInDegrees;
let waitingTime = $.state.waitingTime + deltaTime;
if (waitingTime >= 0.5) {
waitingTime = 0;
if (currentTensDigit !== prevTensDigit) {
angleInDegrees_out = angleInDegrees;
prevTensDigit = currentTensDigit;
$.log(angleInDegrees_out);
$.callExternal(angleInDegrees_out, "test");
}
}
$.state.waitingTime = waitingTime;
});更新頻度はこちらを参考にしてます。
動作確認(数値)
スムーズではないですがなんとか動いてます。。
clusterのMetaGadgetでRaspberry Piにつけたサーボモータを動かしてみました!送る頻度の制限もありスムーズとはいきませんが、、なんとなくは連動しますw#cluster pic.twitter.com/VZf6w6UJ18
— エス。。 (@esc122e) November 20, 2024
頻繁に送るのには向いていないので
一定時間空いて送るようなものを作った方がよさそうです。。