
焼けないモータードライバの作り方(BD63150AFM)

はじめに
モーターやモータードライバが焼損するのは、定格を守らないからです。
モータードライバICの定格電流には測定条件が記載されています。
この測定条件と同等以上でない場合はデータシート記載の定格電流を守っていてもICが焼損する可能性があります。
モータードライバICデータシートの測定条件
BD63150AFMを例題にします。
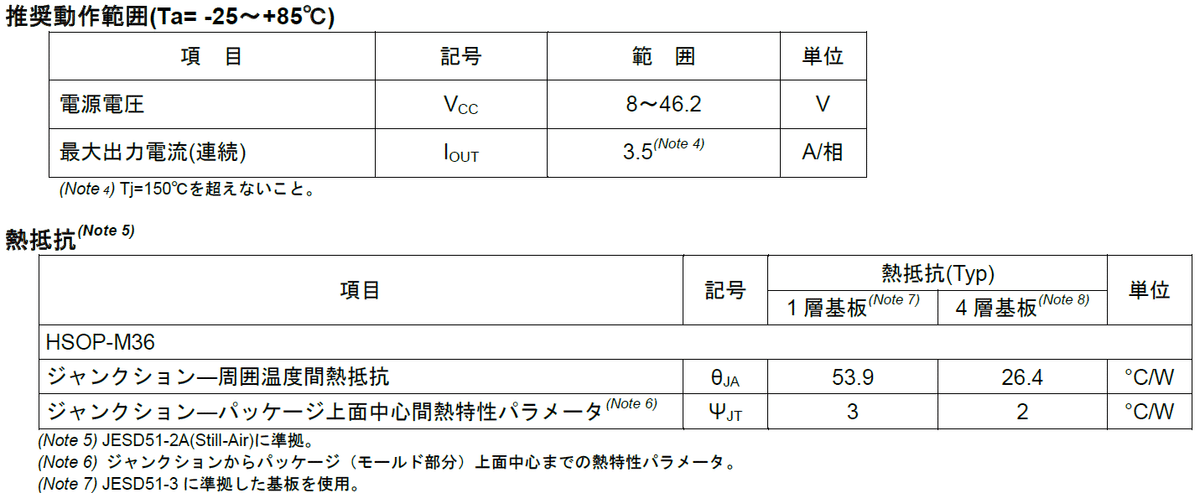
推奨動作範囲3.5A/相の条件として ” TJ=150℃を超えないこと ” が記載されています。
つまり、TJが150℃を超えないように充分な放熱ができるのが大前提です。
このTJを見積もる基本計算式は以下の通りです。
TJ = TA + ΘJA × P TA:周囲環境温度 P:消費電力
TJ = 150℃は絶対最大定格(一瞬でも超えれば素子破壊を起こす値と認識して下さい)ですので、余裕をみて TJ = 100℃、ΘJA = 53.9℃/W 、TA = 25℃ にて消費電力を求めます。
P ≒ 1.39W
Hブリッジの消費電流が支配的ですので、出力オン抵抗0.39Ωのみで電流を計算すると
P = I^2×R
1.39W = I^2 × 0.39Ω
I ≒ 1.89A
この1.89Aを確保する ” ΘJA = 53.9℃/W ” の条件が " JESD51-3 に準拠した基板を使用 " となってます。
ピンとこないと思うので、この基板をFusion360で作りました。
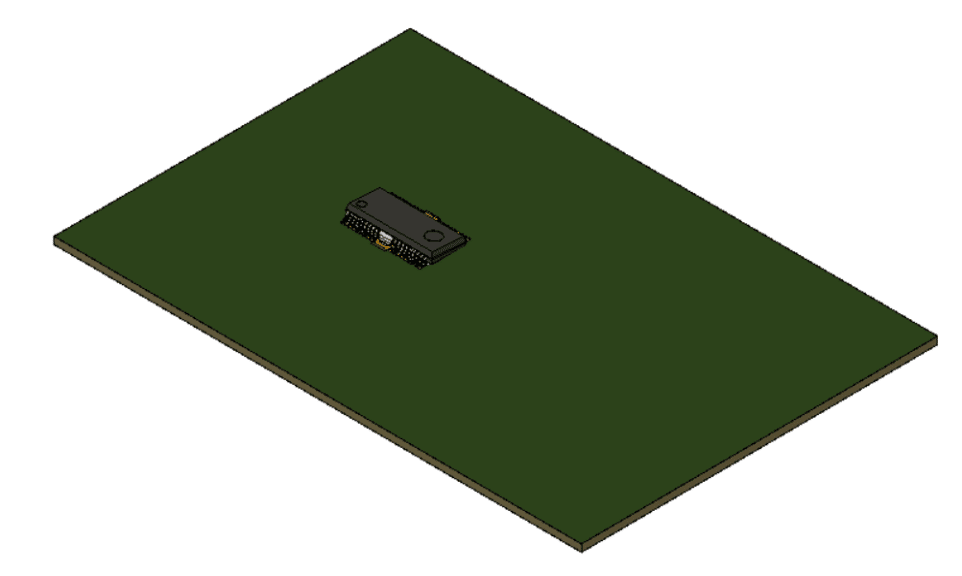
このガラスエポキシ基板(FR-4 76.2mm × 114.3mm 基板厚み1.6mm 銅箔厚み70μm 1層 ) が内寸305mm × 305mm × 305mm の容積に置かれた条件で測定された値が ” ΘJA = 53.9℃/W ” です。
ΘJA = 26.4℃/Wの条件はタイトル画像の右の様に裏面と内層に74.2mm × 74.2mmの放熱用パターンをサーマルビアで熱カップリングした4層基板となります。
P ≒ 2.84W
2.84W = I^2 × 0.39Ω
I ≒ 2.7A
ロボットの中に基板配置する場合は、かなり容積が小さくなると思います。空気の流れが悪い密閉状態に近い基板配置をしていませんか?
基板を小さく作ることが目的になっていませんか?
熱設計の観点から基板寸法と基板配置方法を検証することをお勧めします。
いつもサポートありがとうございます!いただいたサポートは新しい記事の糧となります。 製作記事は部品購入が必要ですので大変助かります!