
(2020.11.10) ワークショップ: Mistika Boutique での Zcam K2 Pro カメラ 6K 200 度 FOV 魚眼ステッチ

本家サイトをGoogle Chromeの自動翻訳機能で翻訳した文章です。
2020年11月10日の記事
このワークショップでは、VR ビデオの新しい魚眼規格を紹介します。レンズ除去技術と組み合わせることで、標準的な正距円筒図法投影と比較して、より高いピクセル効率でより没入型の VR を提供します。最初に記録された魚眼ビデオは、カメラのレンズ プロファイルに基づいて、DeoVR ビデオ プレーヤーの投影メッシュと照合されます。ファイル サイズ、レンダリング、またはビデオ デコードに必要なリソースに追加費用をかけずに、魚眼でより大きな FOV をお楽しみください。
VR コンテンツの制作後のサポートが必要な場合は、専門の DeoVR チームがお手伝いします。
DeoVR の VR クリエイターにも推奨:
このチュートリアルでは、 Mistika のプリセット ファイルを Dropbox にアップロードしました。以下のワークショップで使用してください。
Zcam K2 Pro MKX200 の各カメラは、3696x2772 px 60FPS 200° FOV で記録します。魚眼投影では、5800x2900 ピクセルのステレオ出力で 200 度の FOV をフルに利用します。これは商業的には 6K と呼ばれています。同じチュートリアルで、ZCam K1 Pro VRCA220、MKX220、および MKX200 レンズを使用することもできます。220° レンズはそれに応じてレンダリングされます。魚眼ビデオが DeoVR ビデオ プレーヤーで確実に認識されるようにするには、_VRCA220、_MKX220、または _MKX200 をファイル名に追加すると、正しい投影が自動的に使用されます。一方、正距円筒図法では、極上の画像が歪み、その後、プレーヤー内の仮想球上で押しつぶされます。
正距円筒図法では、180 度または 360 度の投影メッシュを選択する必要があり、間に他のオプションはありません。カメラの 200 度の FOV を利用するには、カメラを 5400x5400 ピクセルで 360 度の投影メッシュに詰め込み、画像の大部分を空のピクセルで埋めるか、5400x2700 ピクセルで 180 度にカットする必要があります。可能な形式は次のとおりです。
左目/右目ステッチ出力ファイル180°正距円筒図法2700×2700並んで5400×2700200°正距円筒図法5400×2700上下5400×5400200°魚眼2900×2900並んで5800×2900
魚眼の 20 度の追加 FOV ゲインと「復元された」レンズ画像は、VR で視聴する場合に非常に重要です。没入感を高め、何もない領域があればそれが損なわれ、私たちが常に自然に行っている頭の動きを補います。
また、魚眼映像はレンダリングとデコードが高速であることが示されています。ビデオは、正距円筒図法レンダリングと比較して、ファイル サイズとビットレートが低くなり、同等以上の品質を提供します。
K2 Pro カメラは 10 ビット深度で記録しますが、マスター ファイルは 8 ビット、100 ~ 120Mbps でレンダリングすることをお勧めします。オリジナルの 10 ビット映像は、後で 8 ビットに変換されたとしても、カラー グレーディングの際に大きな利点をもたらします。10 ビット HDR スクリーン ヘッドセットが市場に投入されると、10 ビットの映像をリリースすることが有益になります。現時点では、現在の VR ヘッドセットで使用されている 8 ビット画面に 10 ビット ビデオを表示する利点はなく、近い将来 10 ビット ヘッドセットが登場する予定もありません。10 ビットビデオのファイルサイズは大きくなることに注意してください。
Nvidia 10xx/20xx/30xx グラフィックス カードを実行している Oculus Quest 2 および Valve Index または HP Reverb G2 ヘッドセットなどのテザー ヘッドセットは、最大 8172x4096@60FPS または 8192x8172@30FPS までデコードできます。
その他の提案:
映像に表示されているレンズを、他のレンズからの画像の対応する部分に置き換えて、レンズが「きれいになった」ビデオを取得します (これらについては、以下のチュートリアルを参照してください)。
ウォーターマークをビデオの側面ではなく上部に配置して、邪魔にならないようにします。あるいは、マスクに透かしを入れることもできますが、これは VR では表示されません (以下で提案されているように)。

Mistika Boutique Zcam K2 Pro カメラ用魚眼投影チュートリアル
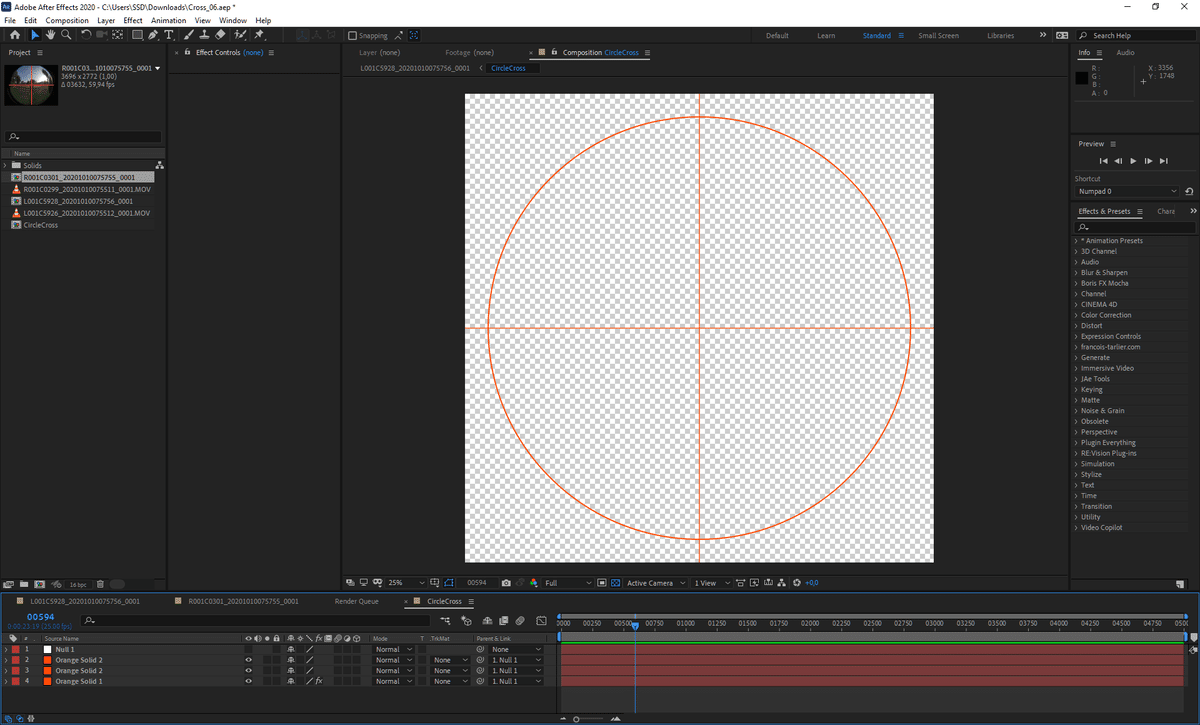
1. レンズの中心にできるだけ近づけて、円と十字を重ねた単一のフレームを準備します。Zcam K2 Pro の円の直径は約 2850 ピクセルです。
2. VR Stitch ノードを追加し、カメラをセットアップして、正距円筒図法の場合と同様にステレオ位置を修正します。
3. VR Stitch -> Output Camera -> Mappingに移動し、 Equidistant Fisheyeに設定します。

4.魚眼を正方形に合わせます。フッテージをステップ 1 で準備したフレームに置き換えます。VR ステッチ上にフレーミング ノードを追加し、そのCrop / Left の値を 25 に、Crop / Right の値を 75 に設定します。

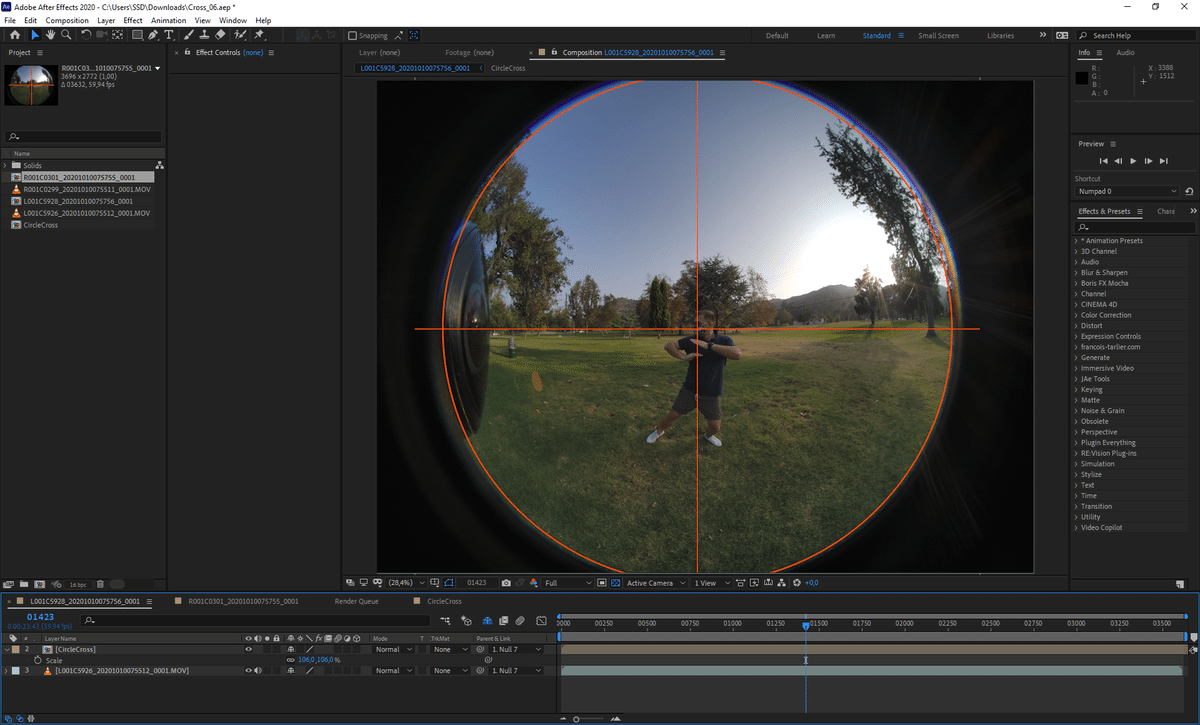
5. VR ステッチ -> 出力カメラ -> 焦点距離に戻り、円オーバーレイの直径をクロップの境界に合わせるスケールとして使用します。また、オーバーレイ円がトリミングに水平に収まるように、各入力カメラ/オフセット Xを配置します。両方のカメラでこれを実行してください。

6.出力カメラ / オフセット Yを調整して、カメラを垂直に合わせ続けます。ステレオ モード/ミックスに移動し、グリッド オーバーレイを有効にすると、両方の垂直方向の中心が表示され、中心のグリッド ライン上の平均位置を移動できるようになり、これを簡単に行うことができます。

7. フレームをオーバーレイに置き換えてフッテージに戻し、レンダリングします。
DeoVR 用に映像を編集する
DeoVR プラットフォームで最適に見えるように映像を準備するための詳細なガイドが用意されています。Z CAM K2Pro と Canon R5 C の両方について、 次の段階的な手順に従ってください。