

#quadraped

四足歩行ロボット進捗④
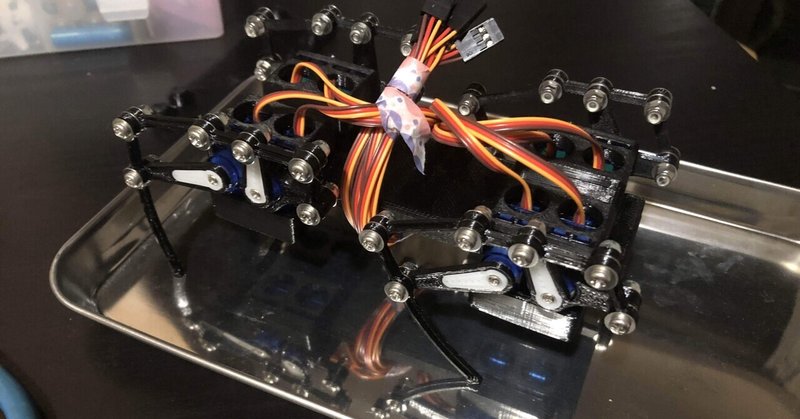
ついにサーボをまとめたタイプの機体一号が完成。
二関節の足x4で8自由度。
肩にあたる回転軸も付けたいけど強度の問題とかつけても動き作るのがそもそもまだできないので。
動かしてみる!
単純な動きを作るだけで結構時間がかかる。以下のような問題点
・配線ごっちゃでどのケーブルと何番のピンを対応させるかでこんがらがる
・モーターが安物なので初期値に全部まわしてからもっかい組み立てることになる
・

四足歩行ロボット進捗③
4月色々疲れるので全然進んでないがまとめないと脳みそが次のこと考えられない構造なのでちょっとまとめ。
調べた感じ小型の四足歩行はざっくり4パターンくらいあって、
1)関節すべてモーターのクモみたいなやつ
2)関節すべてモーターの犬タイプ
3)マジックハンドみたいにモーターから足を出してる犬タイプ(Pupperとか)
4)完全オリジナルのとかハイブリッド
予算的とか技術とか作りたいもののバラ