
Photo by
motoshiandromeda
【日刊ドローン情報 No.132】KDDIとJAL、ドローン運航効率化に向けた共同技術開発へ--「1対多運航」目指す

KDDIとJALがドローンの運行管理システムに関する要素技術開発に共同で取り組むということです。その要素技術とは「1対多運航」ということで,つまりオペレーター1人に対して複数のドローンの運航を管理するというものです。
運航管理システムとしては,新エネルギー・産業技術総合開発機構(NEDO)がDRESSプロジェクトとして,運航管理システム開発の取り組みを実施しているのが有名です。運航管理システムの概要は下図のようになっており,大きく分けると飛行する各機体を管理する運航管理機能(UASSP),複数ある運航管理機能を統合的に管理する運航管理統合機能(FIMS),飛行に必要な3次元地図情報や気象情報を管理する情報提供機能の3つに分かれます。UASSPは図からもわかるように,ドローン事業者毎に複数あります。おそらく,A事業者の物流ドローンサービス,B事業者のドローン点検サービスのような形で存在したり,いろいろなドローンサービスを統合的に管理する事業者毎のような形で形成されるのでしょう。さらに,UASSPは機体の飛行を制御するシステム(FOS)と連携し,機体の運航状況を管理します。
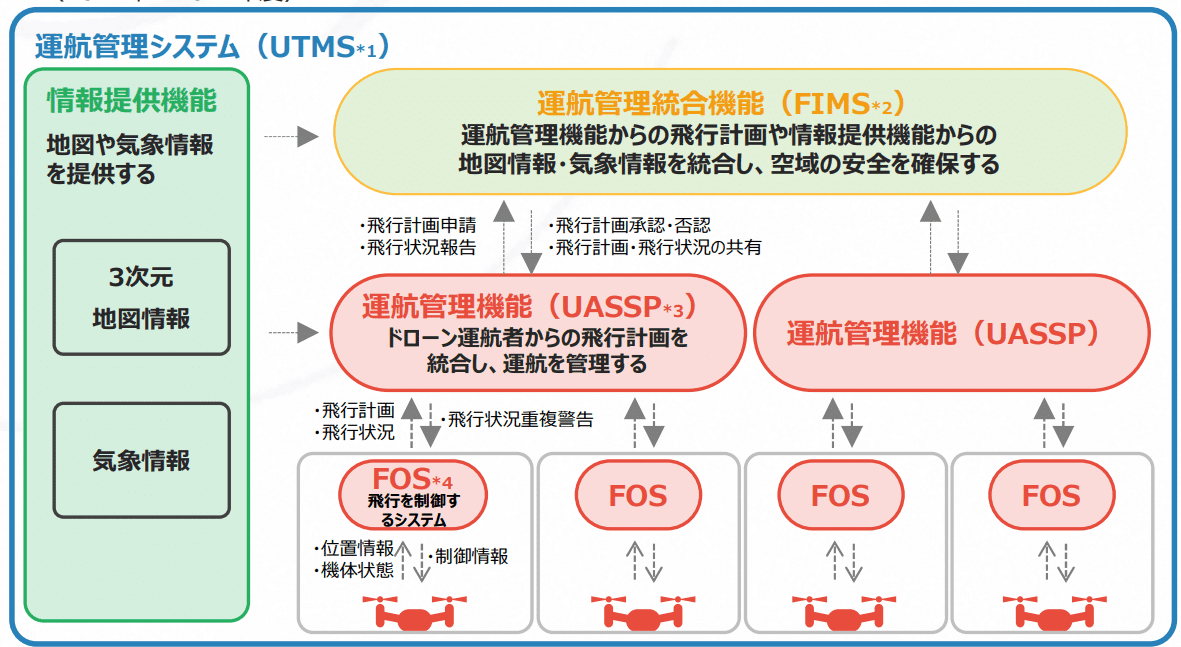
今回の記事にある「1対多運航」は,おそらくこの図中の飛行を制御するシステム(FOS)において,複数の機体の飛行制御をする機能の開発を行うのでしょう。
一人で複数の機体の制御を行うと言っても,管制卓にいる人がプロポ(送信機)を持って操縦するというわけではないと思います。まだどのように制御するのか,イメージはつかないので,今後の取り組み報告を楽しみにしたいと思います。