
第4号「コンピュータビジョンの深層学習ベース化」

Control Color: Multimodal Diffusion-based Interactive Image Colorization
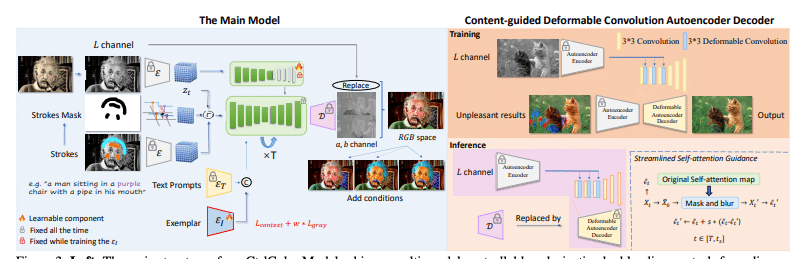
画像に色のヒントを与えて着色するための拡散モデルです。
どんなもの?: 高度に制御可能な対話式画像着色手法であり、無条件および条件付き画像着色を支援し、色溢れや不正確な着色を解決します。
先行研究と比べてどこがすごい?: 複数の条件(テキストプロンプト、ストローク、サンプル画像)を統一フレームワークで扱い、色溢れと不正確な着色に対処する新しいアプローチを提案しています。
技術の手法やキモはどこ?: 事前訓練された安定拡散モデルを活用し、ユーザーのストロークを正確な局所色操作にエンコードし、サンプルに似た色分布を制約する方法です。
どうやって有効だと検証した?: 広範な比較とユーザースタディを通じて、提案モデルが最先端の画像着色方法よりも質的および量的に優れていることを示しました。
議論はある?: 論文では、提案手法の詳細な技術的説明、実装に関する議論、および将来的な改善の可能性について考察しています。
GaussainObject: Just Taking Four Images to Get A High-Quality 3D Object with Gaussian Splatting
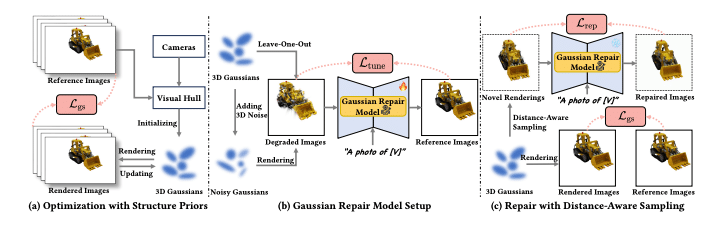
どんなもの?:GaussianObjectは、わずか4枚の画像から高品質な3Dオブジェクトを再構築するためのフレームワークです。ガウシアンスプラッティングを利用しています。
先行研究と比べてどこがすごい?:極めて少ない視点(4視点)からでも高品質な3D再構築を可能にし、以前の最先端技術よりも顕著に性能が向上しています。
技術の手法やキモはどこ?:初期化にビジュアルハルを利用し、構造プライアを最適化プロセスに組み込むこと、及び、欠落または圧縮されたオブジェクト情報を補うためのガウシアン修復モデルの設計がキーとなっています。
どうやって有効だと検証した?:MipNeRF360、OmniObject3D、OpenIlluminationといった複数の難易度の高いデータセットで、4視点のみからの再構築を行い、既存の手法と比較して定量的および定性的に優れた結果を得ました。
議論はある?:精密なカメラポーズに依存する点、極端な視点でのポッピングアーティファクト、安定した拡散VAEにおける色シフトの問題が今後の研究課題として挙げられています。
Beyond Kalman Filters: Deep Learning-Based Filters for Improved Object Tracking
どんなもの?:深層学習に基づく新しいフィルタリング手法を提案しており、カルマンフィルターの代替として、特に非線形動きを持つオブジェクトの追跡において、その性能を向上させる。
先行研究と比べてどこがすごい?:従来のカルマンフィルターが苦手とする非線形動きを持つオブジェクトの追跡に対して、学習可能なモーションモデルを用いることで高い追跡精度を実現。
技術の手法やキモはどこ?:ベイジアンフィルターに学習可能なモーションモデルを組み込み、エンドツーエンドで学習可能なフィルターを実装。さらに、複数のモーションモデルアーキテクチャを提案している。
どうやって有効だと検証した?:複数のオブジェクト追跡データセットにおいて、従来のカルマンフィルターを使用した追跡方法と比較し、提案手法の有効性を定量的に検証。
議論はある?:提案手法の適用可能範囲や、特定のシナリオにおける限界、さらなる改善点について議論している。また、非線形動きのモデリングにおける今後の課題についても言及している。
[1] Control Color: Multimodal Diffusion-based Interactive Image Colorization
[2]GaussainObject: Just Taking Four Images to Get A High-Quality 3D Object with Gaussian Splatting
[3]Beyond Kalman Filters: Deep Learning-Based Filters for Improved Object Tracking