
STM32F303K8T6のUSART1通信実験

STM32F303K8T6のUSART1通信は使用する予定なので通信実験を行った。端子はシリアル書込みに使用した、
・19pin PA9(USART1_TX)
・20pin PA10(USART1_RX)
を使用する。
開発はSTM32CubeIDEを使用して、
HAL(Hardware Abstraction Layer)を使用する。
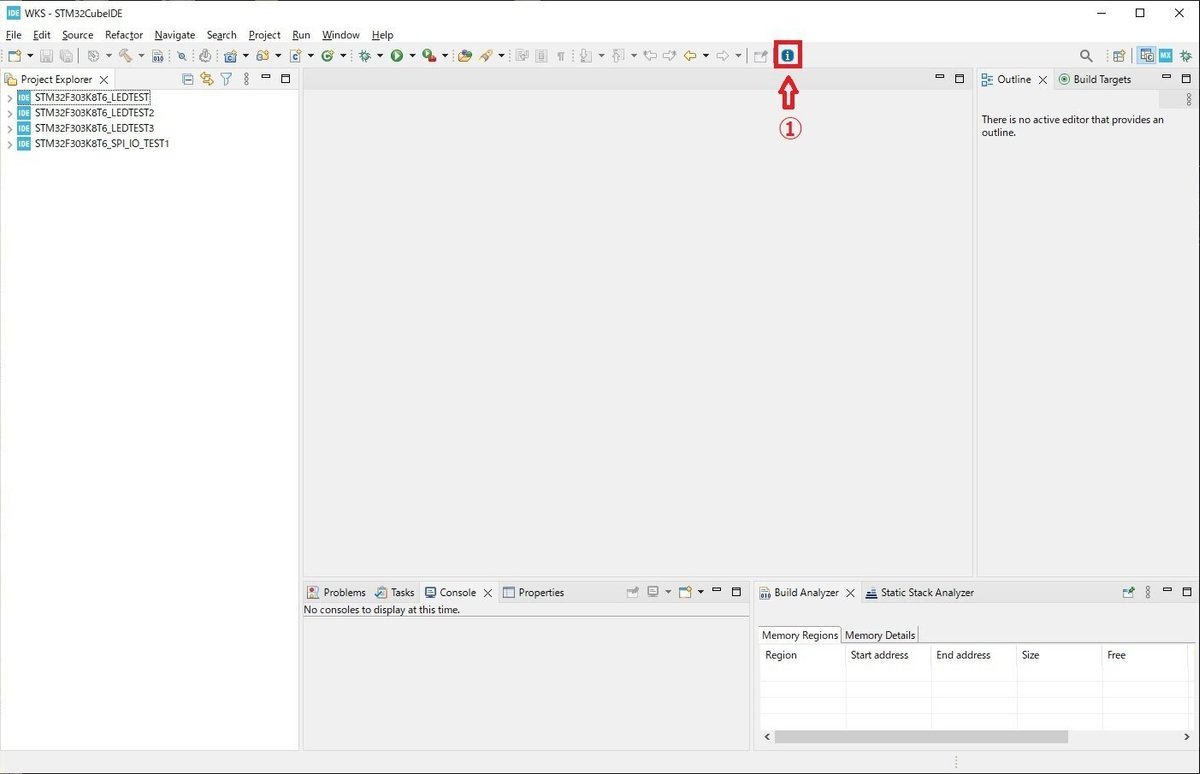
STM32CubeIDEを立ち上げて、
①、「Information Center」をクリックする。
Information Centerの「Start new STM32 projegt」をクリックする。
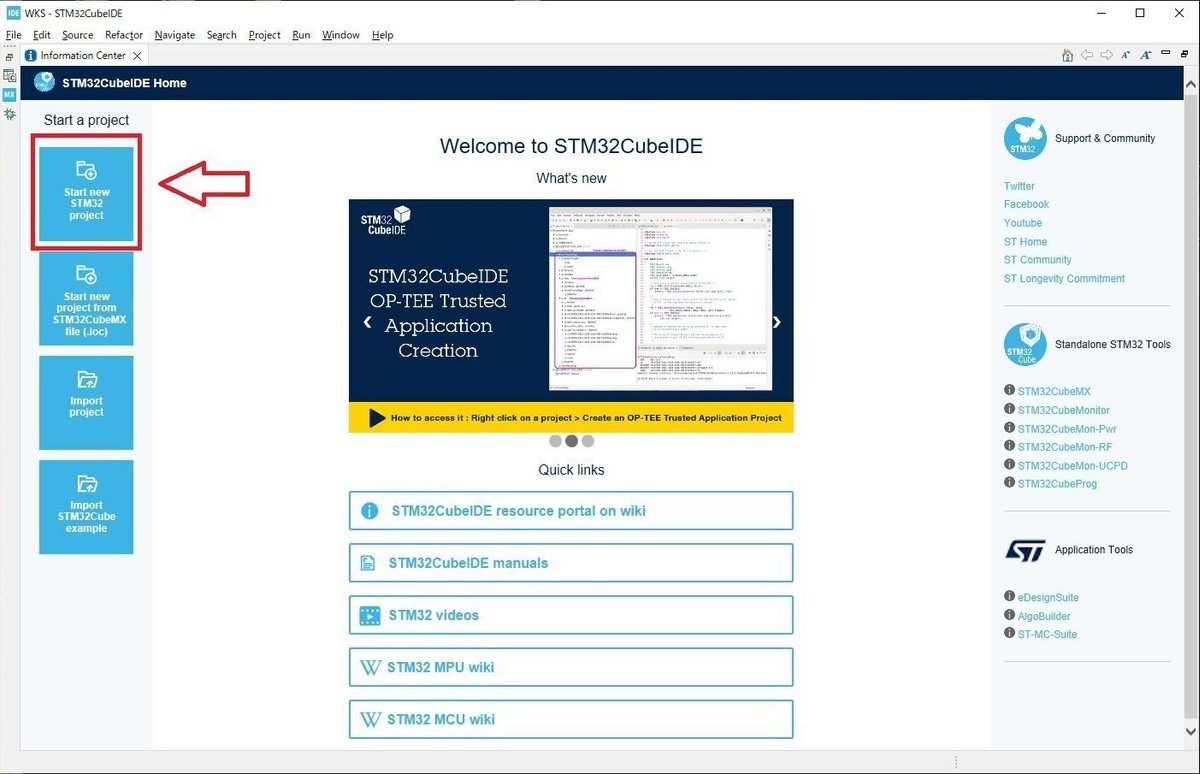
Target Selectionが表示される。
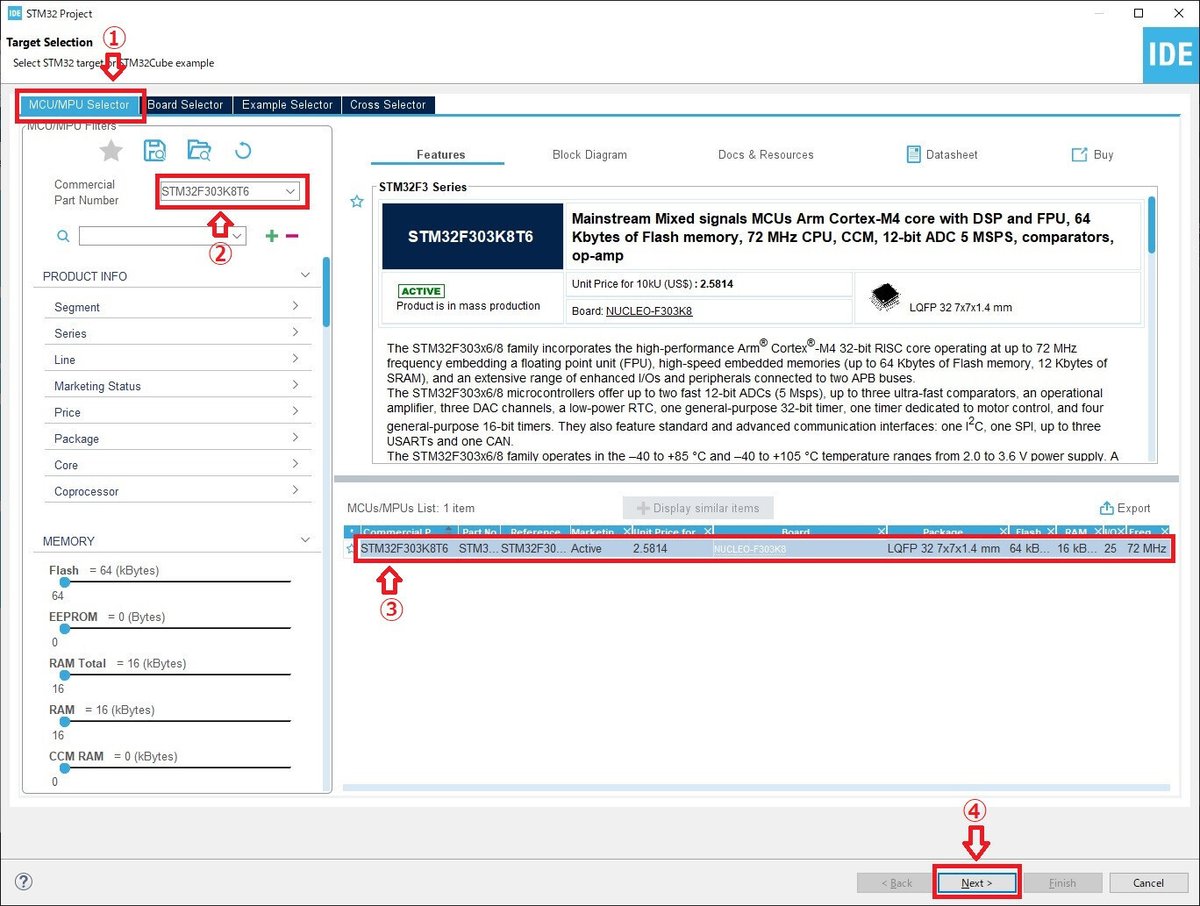
STM32F303K8T6を使用する為の設定を行う。
①、「MCU/MPU Selector」タブを選択。
②、Commercial Part NumberにSTM32F303K8T6と入力する。
③、MCUs/MPUs ListのSTM32F303K8T6をクリックする。
④、「Next>」をクリックする。
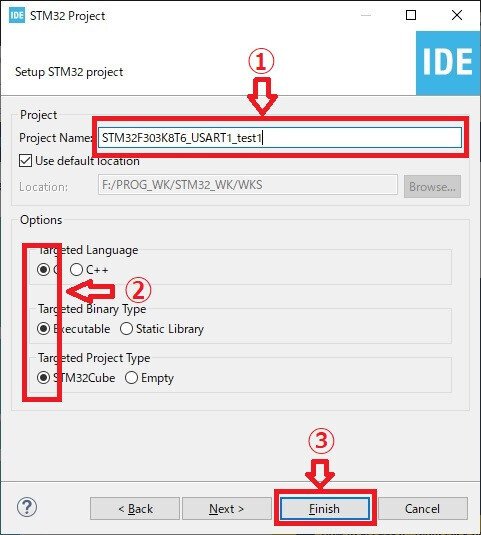
STM32 Projrctダイアログで、
①、プロジェクト名を入力。
②、Optionsはそのまま。
③、「Finish」をクリックする。
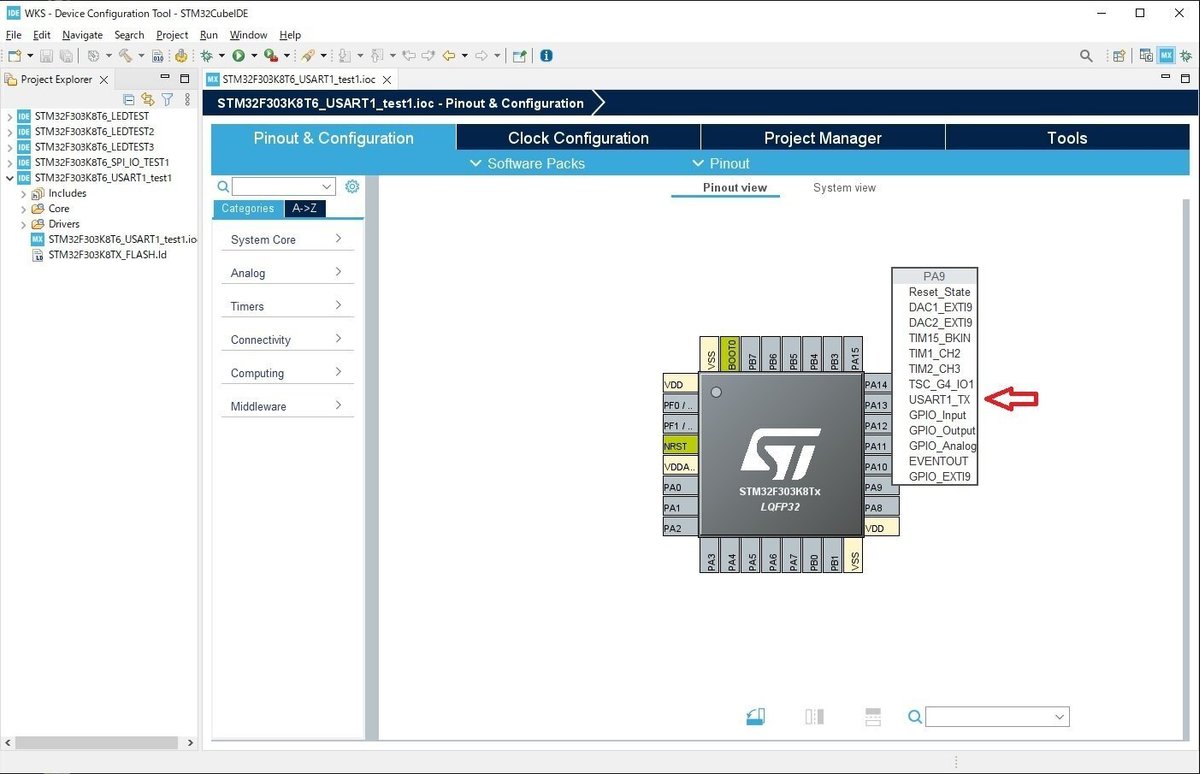
USART1で使用するピンアサインを設定する。
Pinout & ConfigurationにてPA9をクリックして、USART1_TXを選択する。
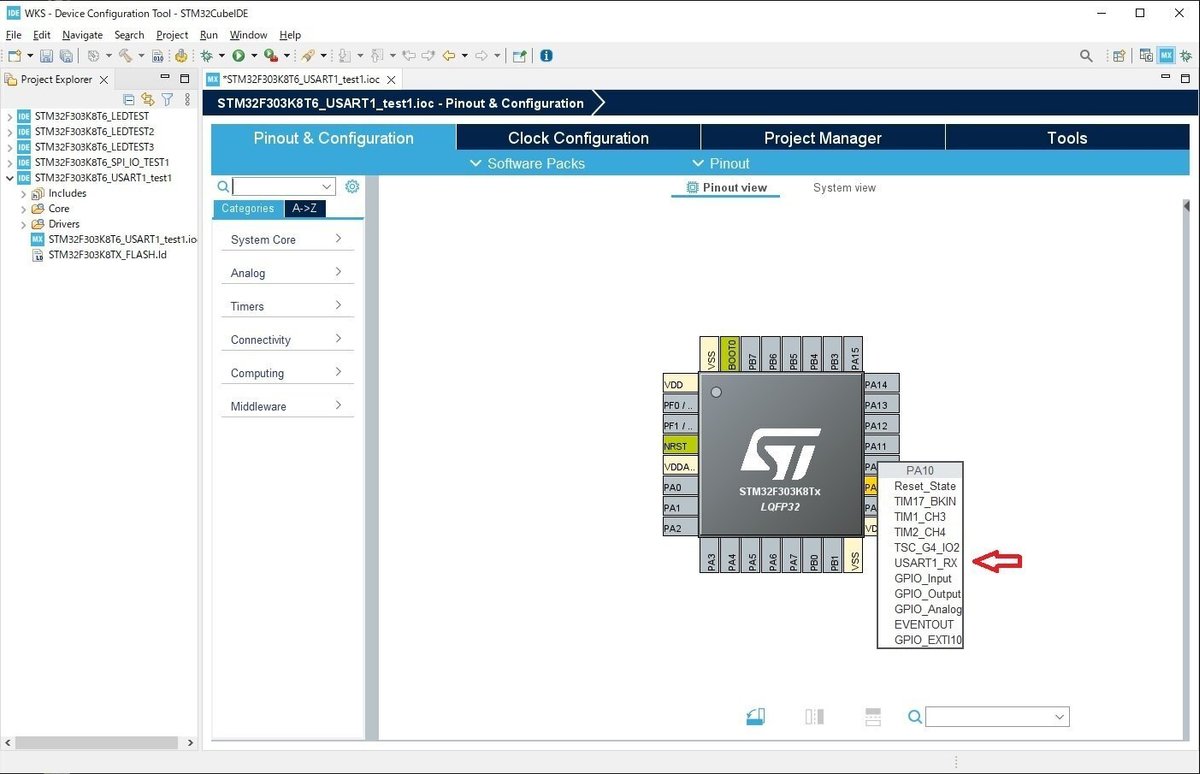
PA10をクリックして、USART1_RXを選択する。
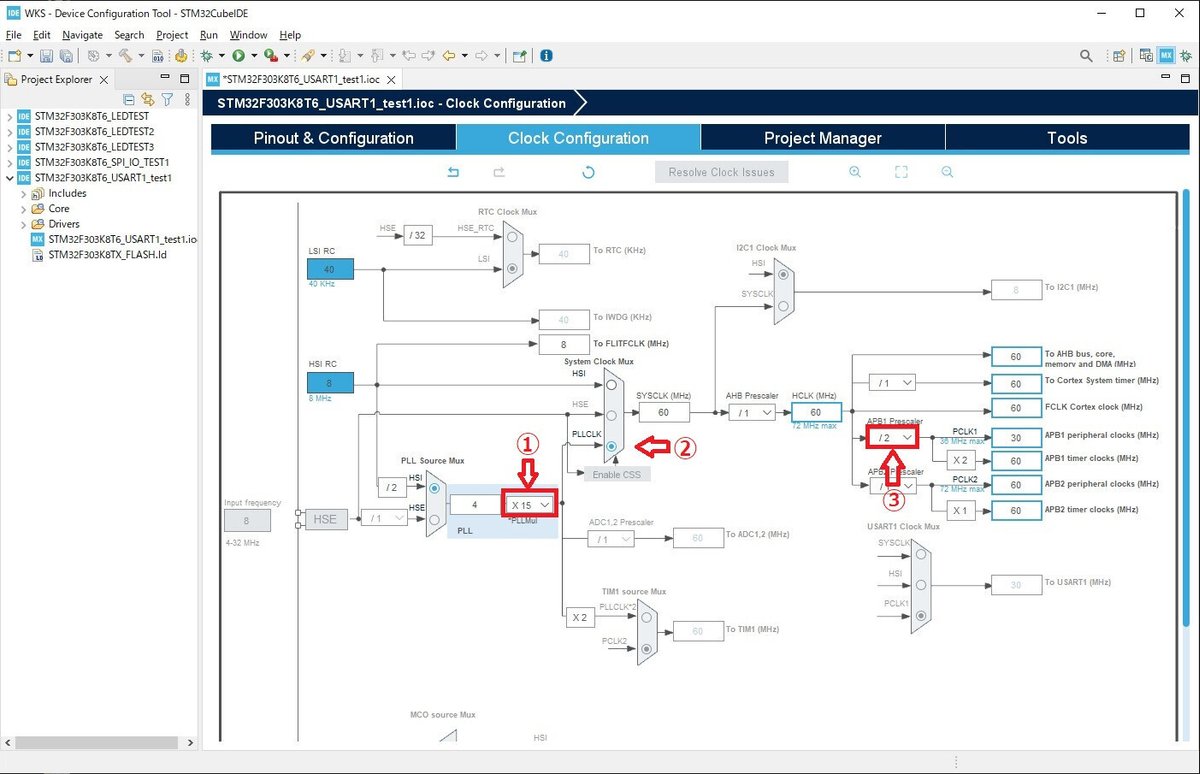
Clock Configurationタブをクリックして、クロックの設定を行う。
この記事を参考にさせていただきHCLKを60MHzに設定する。
①、PLLの*PLLMulを「X 15」に設定する。
②、System Clock MuxをPLLCLKに設定する。
③、APB1 Prescalerを「/ 2」に設定する。
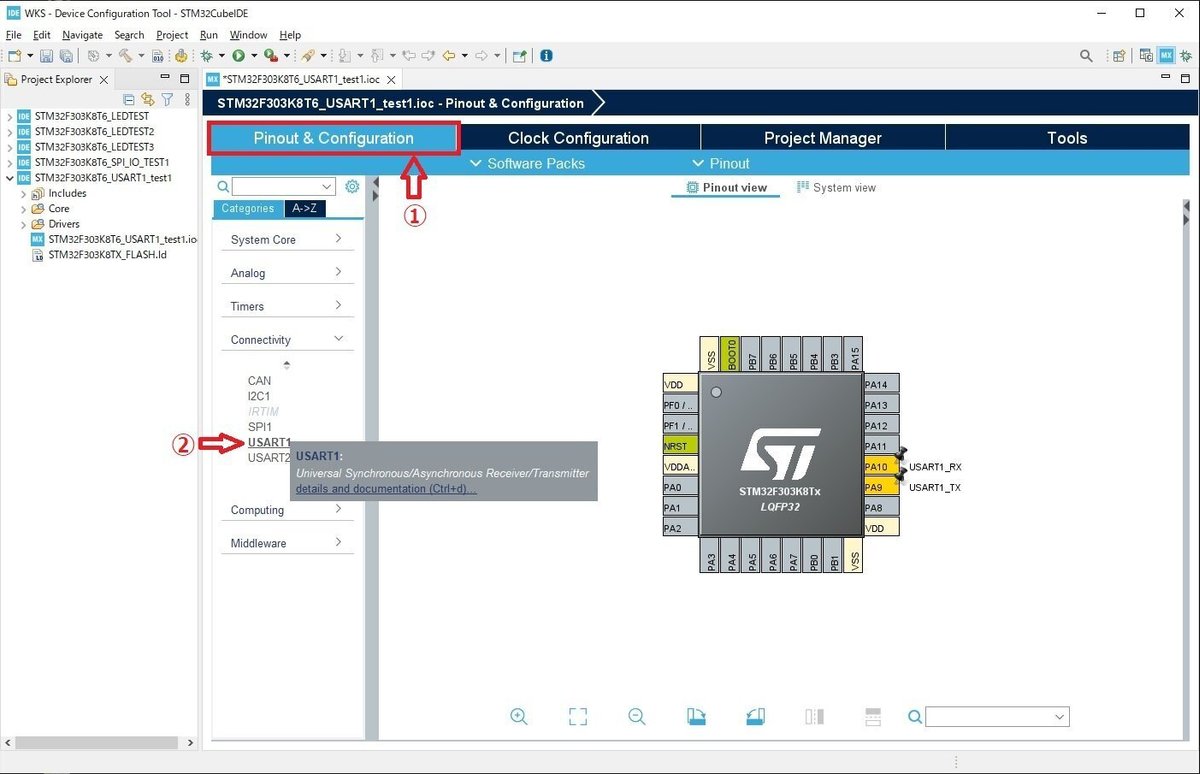
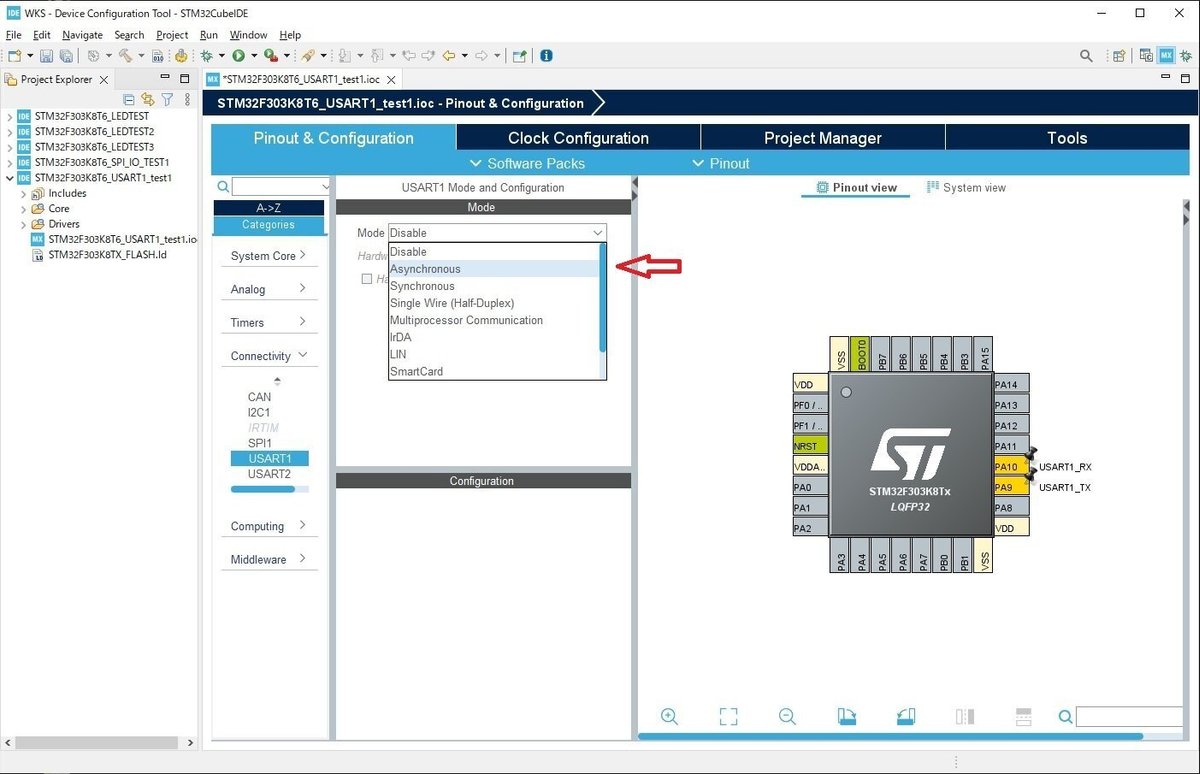
①、Pinout & Configurationタブをクリックして、USART1の設定を行う。
②、Connectivity内のUSART1を選択する。
USART1の設定は、以下の様にする。
・非同期
・115200 Bits/s
・8bit data, none parity, 1stop bit(この3つはデフォルト設定の様だ。)
・送受信割込みを使用する。
USART1 Mode and Configuration内のModeを「Asynchronous」に設定する。(非同期設定)
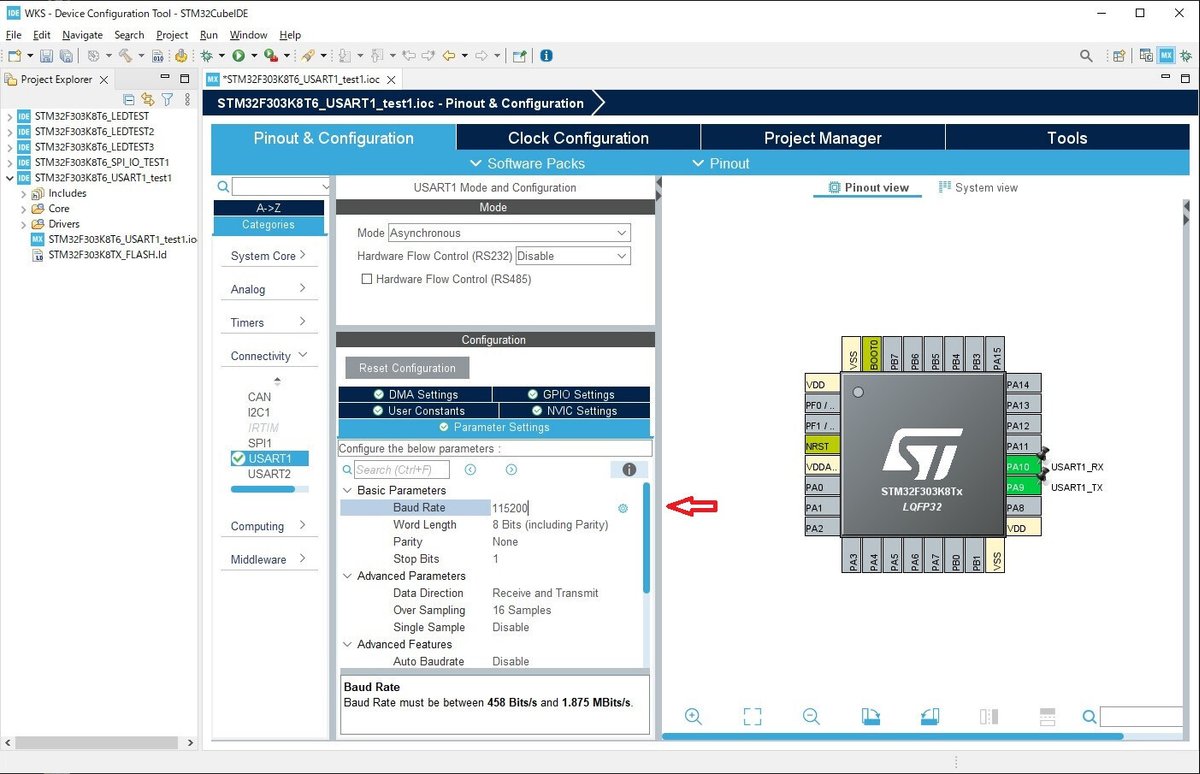
Parameter SettingsのBaud Rateを「115200」に設定する。
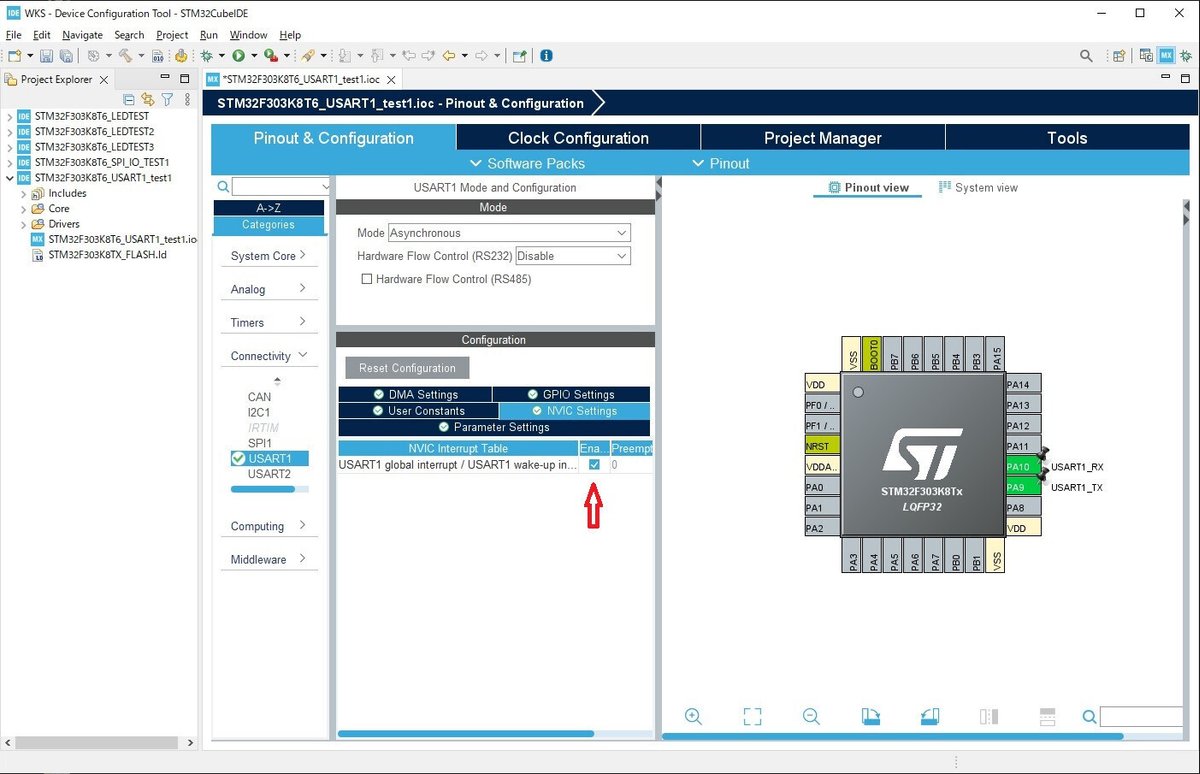
NVIC SettingsのUSART1 global interrupt/USART1 wake-up in…のEnabledにチェックを入れる。(送受信割込み設定)
設定が完了したので、「保存」をクリックする。
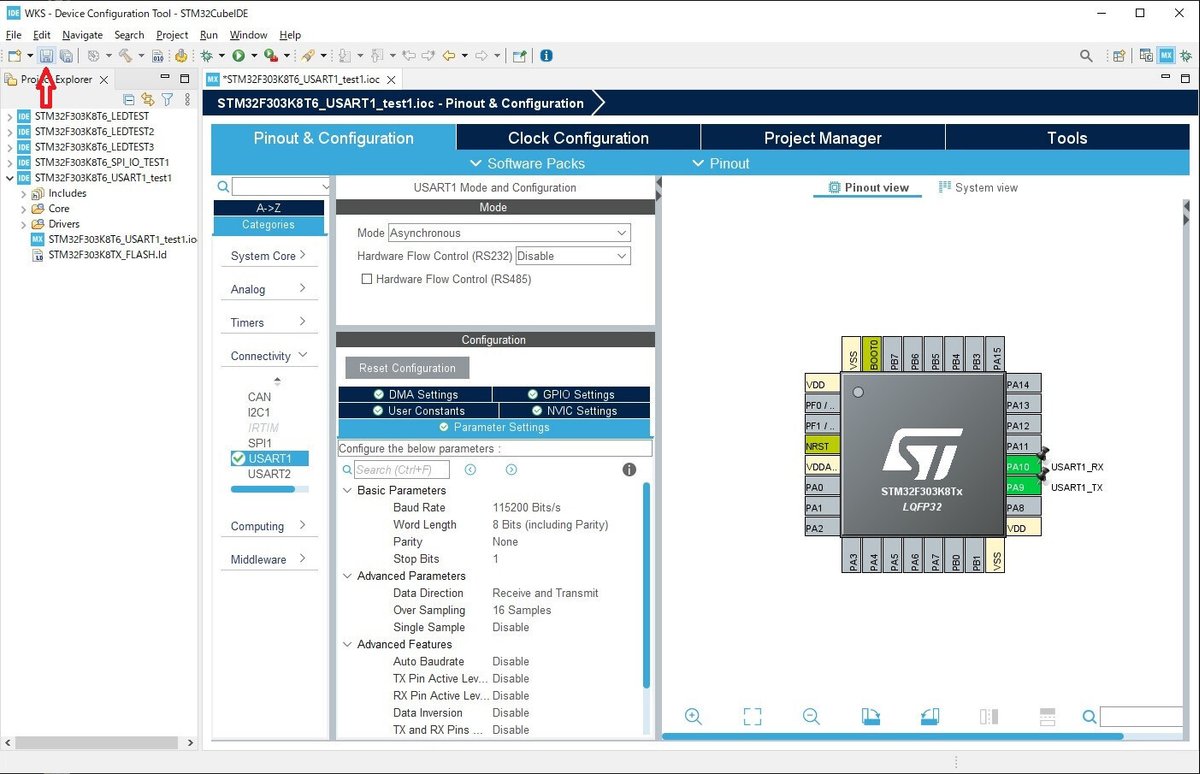
コードを生成するか?のダイアログが表示されるので「Yes」をクリックする。
「Open Associated Perspective?」ダイアログも「Yes」をクリックした。
コードが生成された。生成されたmain.cにコードを追加していく。
main.cの以下の部分のみコードを追加している。
・「/* USER CODE BEGIN 0 */」と「/* USER CODE END 0 */」の間の部分。
・「/* USER CODE BEGIN 2 */」と「/* USER CODE END 2 */」の間の部分。
・「/* USER CODE BEGIN 3 */」と「/* USER CODE END 3 */」の間の部分。
「/* USER CODE BEGIN 0 */」と「/* USER CODE END 0 */」に囲まれた部分は以下のコードを追加している。
・USART1関係の変数。
・USART1関係の初期化や送受信の関数。
・全て完了後に実行されるUARTの送信と受信のコールバック関数。
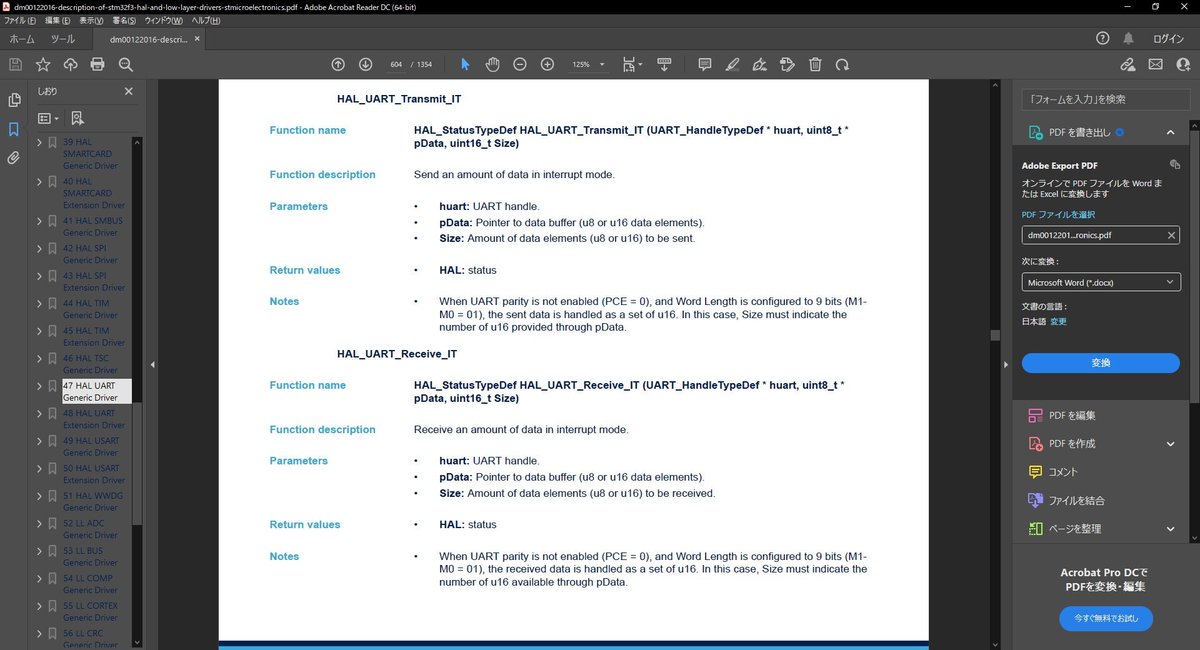
この中で、以下の関数がUSART関係のHALのAPIの関数。
・HAL_UART_Receive_IT関数:割込み使った受信。
・HAL_UART_Transmit_IT関数:割込み使った送信。
・HAL_UART_RxCpltCallback関数:データ受信全て完了後に実行される。
・HAL_UART_TxCpltCallback関数:データ送信全て完了後に実行される。
「/* USER CODE BEGIN 2 */」と「/* USER CODE END 2 */」で囲まれた部分に追加しているのは、USART1の初期化関数を呼び出している部分。
「/* USER CODE BEGIN 3 */」と「/* USER CODE END 3 */」で囲まれたwhileループ内に追加しているのは、USART1で受信したデータをそのまま送信している部分。以下、変更追記したmain.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart1;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USART1変数*/
uint8_t ust1_rx_buf[1]; /* 受信割込み側で保存 */
uint8_t ust1_rx_q_buf[256]; /* ユーザー側受信バッファ */
uint8_t ust1_rx_q_rdix; /* ユーザー側受信バッファ読込位置 */
uint8_t ust1_rx_q_wtix; /* ユーザー側受信バッファ書込位置 */
uint8_t ust1_tx_buf[1]; /* 送信割込みに渡す */
uint8_t ust1_tx_it_flg; /* 送信割込みリクエスト状態(送信割込み設定中に次のデータをセット防止用)*/
uint8_t ust1_tx_q_buf[256]; /* ユーザー側送信バッファ */
uint8_t ust1_tx_q_rdix; /* ユーザー側送信バッファ読込位置 */
uint8_t ust1_tx_q_wtix; /* ユーザー側送信バッファ書込位置 */
/****************************/
/* USART1 function */
/****************************/
/* 受信初期化 */
void my_usart1_rx_init(void)
{
ust1_rx_q_rdix = ust1_rx_q_wtix = 0; /* Qバッファインデックス初期化 */
HAL_UART_Receive_IT(&huart1, ust1_rx_buf, 1); /* 受信割込みスタート*/
}
/* 受信とチェック */
/*int16_t my_usart1_fgetc(void)*/ /* 関数型でint16_tは使えない */
/*signed short my_usart1_fgetc(void)*/ /* 関数型でsigned shortは使えない */
/*short my_usart1_fgetc(void)*/ /* 関数型でshortは使えない */
int my_usart1_fgetc(void)
{
if (ust1_rx_q_rdix != ust1_rx_q_wtix) /* 受信データが有る時 */
return ust1_rx_q_buf[ust1_rx_q_rdix++];
else /* 受信データが無い時 */
return -1;
}
/* 送信初期化 */
void my_usart1_tx_init(void)
{
ust1_tx_q_rdix = ust1_tx_q_wtix = 0; /* Qバッファインデックス初期化 */
ust1_tx_it_flg = 0; /* 送信割込みリクエスト状態解除 */
}
/* 送信割込スタートとデータセット */
void my_usart1_tx_it_st(void)
{
ust1_tx_buf[0] = ust1_tx_q_buf[ust1_tx_q_rdix++]; /* 送信Qバッファから読込 */
HAL_UART_Transmit_IT(&huart1, ust1_tx_buf, 1); /* 送信割込みスタート */
ust1_tx_it_flg = 1; /* 送信割込みリクエスト状態設定 */
}
/* 一文字送信 */
void my_usart1_fputc(uint8_t ch)
{
ust1_tx_q_buf[ust1_tx_q_wtix++] = ch;
if (ust1_tx_it_flg == 0) /* 送信割込み中でなかったら */
my_usart1_tx_it_st(); /* 送信割込みスタート */
}
/* 0終端を持つ文字列を送信(fputsは改行なしなのでなし) */
void my_usart1_fputs(uint8_t *ss)
{
while (*ss != '\0') my_usart1_fputc(*ss++);
}
/* 送受信初期化 */
void my_usart1_init(void)
{
my_usart1_rx_init();
my_usart1_tx_init();
}
/****************************/
/* USART Callback */
/****************************/
/* データ受信全て完了 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
/* USART1 */
if (huart->Instance == USART1) {
ust1_rx_q_buf[ust1_rx_q_wtix++] = ust1_rx_buf[0]; /* 受信Qバッファに積む */
HAL_UART_Receive_IT(&huart1, ust1_rx_buf, 1); /* (次の)受信割込みスタート*/
}
}
/* データ送信全て完了 */
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
/* USART1 */
if (huart->Instance == USART1) {
ust1_tx_it_flg = 0; /* 送信割込みリクエスト状態解除 */
if (ust1_tx_q_rdix != ust1_tx_q_wtix) /* 送信データはあるか? */
my_usart1_tx_it_st(); /* 送信割込みスタート */
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* USART1初期化 */
my_usart1_init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
int ch;
if ((ch = my_usart1_fgetc()) != -1) /* 受信していたら */
my_usart1_fputc(ch); /* 送信 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL15;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART1;
PeriphClkInit.Usart1ClockSelection = RCC_USART1CLKSOURCE_PCLK1;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
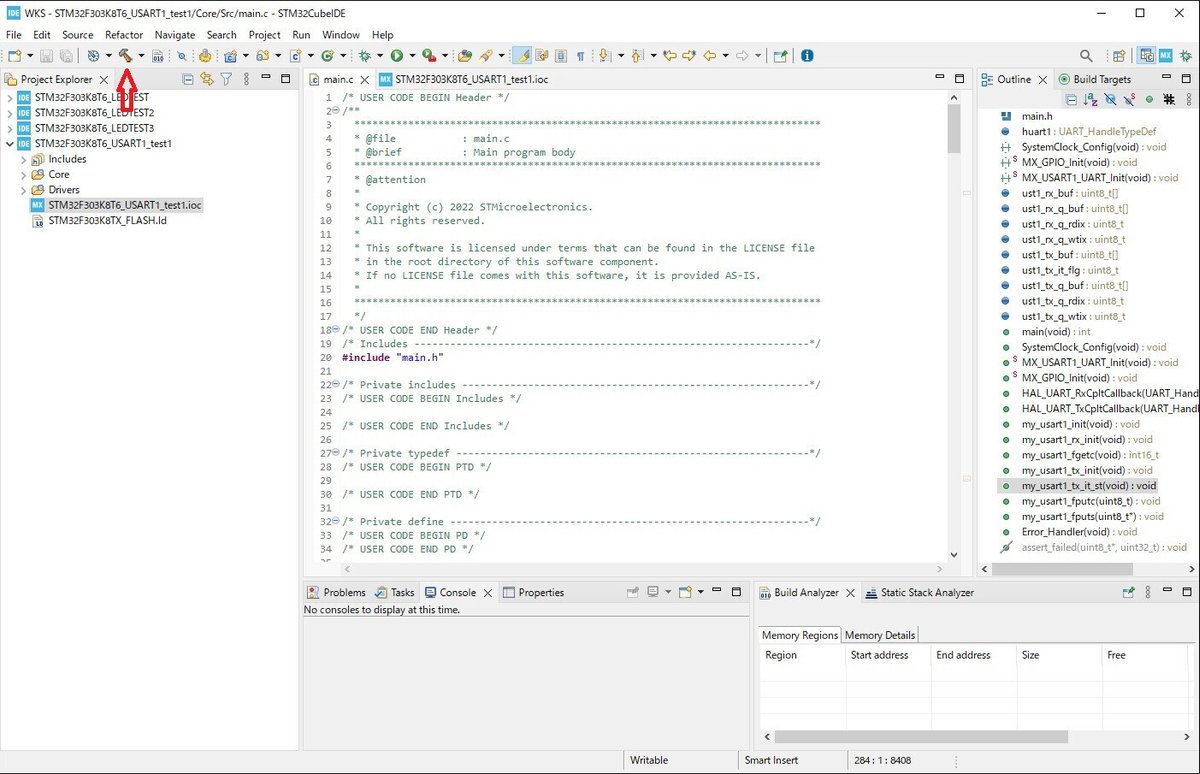
プログラムの変更が終わったら、「ビルド」をクリックする。
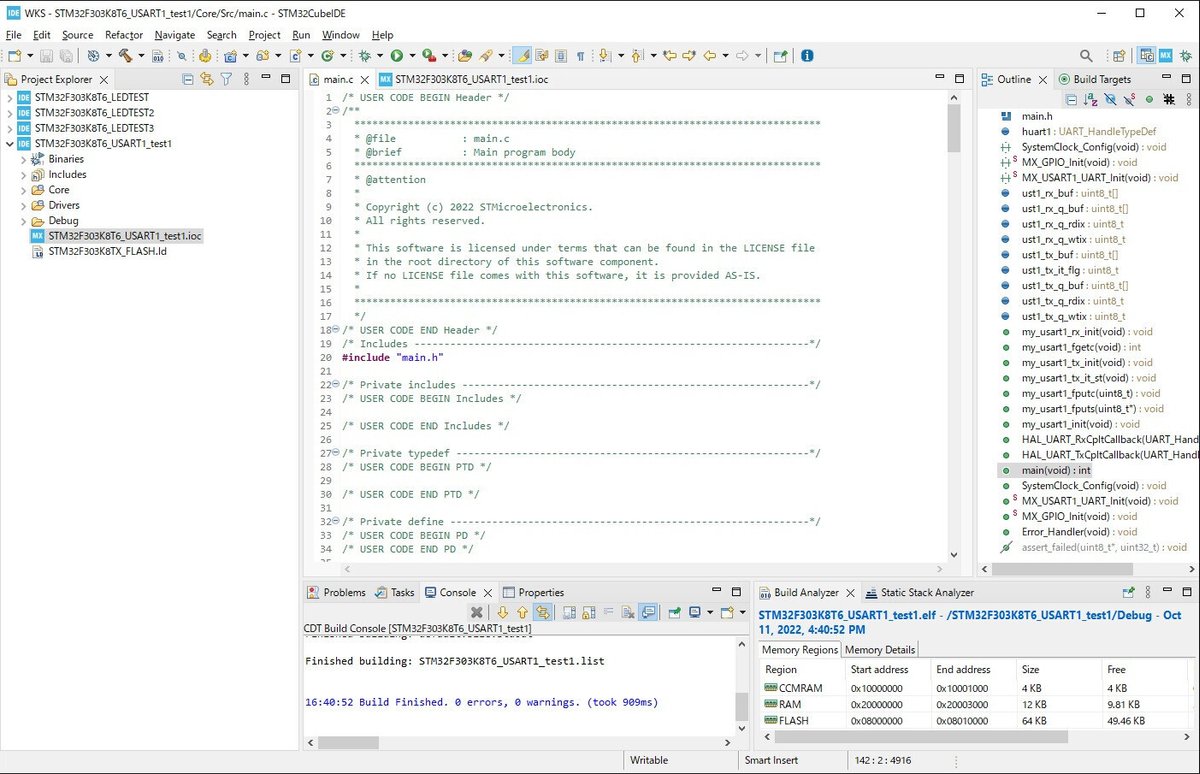
正常に終了すると、プロジェクトの「Debug」フォルダ内に「.elf」ファイルが作成される。これをマイコンボードに書き込む。
エラーが発生した時には、修正とビルドを繰り返す。
又、完全にデバックが完了したら、ビルドボタン内でDebugからReleaseに変更する。
以前の記事を参照してプログラムをマイコンボードに書き込む。
USART1通信の実験
プログラムを書き込んだ時と同じ様にPCと接続する。
PC側のプログラムは、今回Tera Termを使用した。
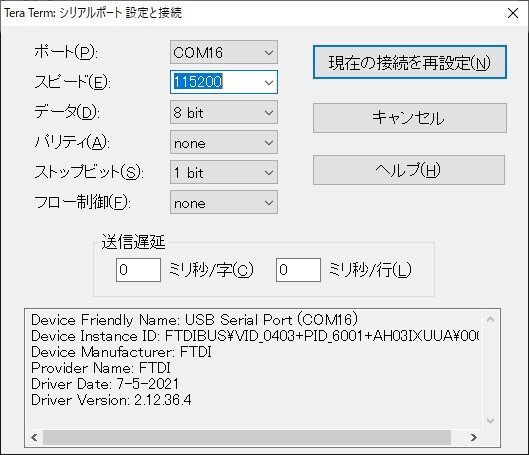
Tera Termを立ち上げて、シリアルを選択してCOMポート番号を選択して、「OK」をクリックする。自分の環境では、COM16だった。

「設定」メニューの「シリアルポート」を選択する。
「Tera Term シリアルポート設定と接続」ダイアログの「スピード」で「115200」を選択して、「現在の接続を再設定」をクリックする。
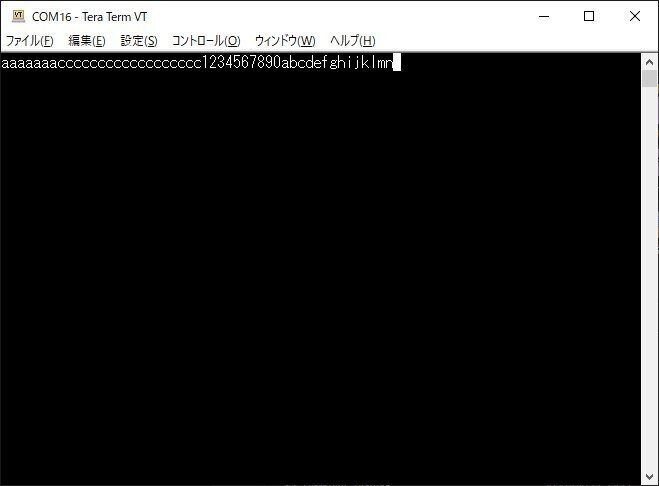
成功すると、
キーボードで入力/送信した物が、端末画面上に受信/表示される。
以上。